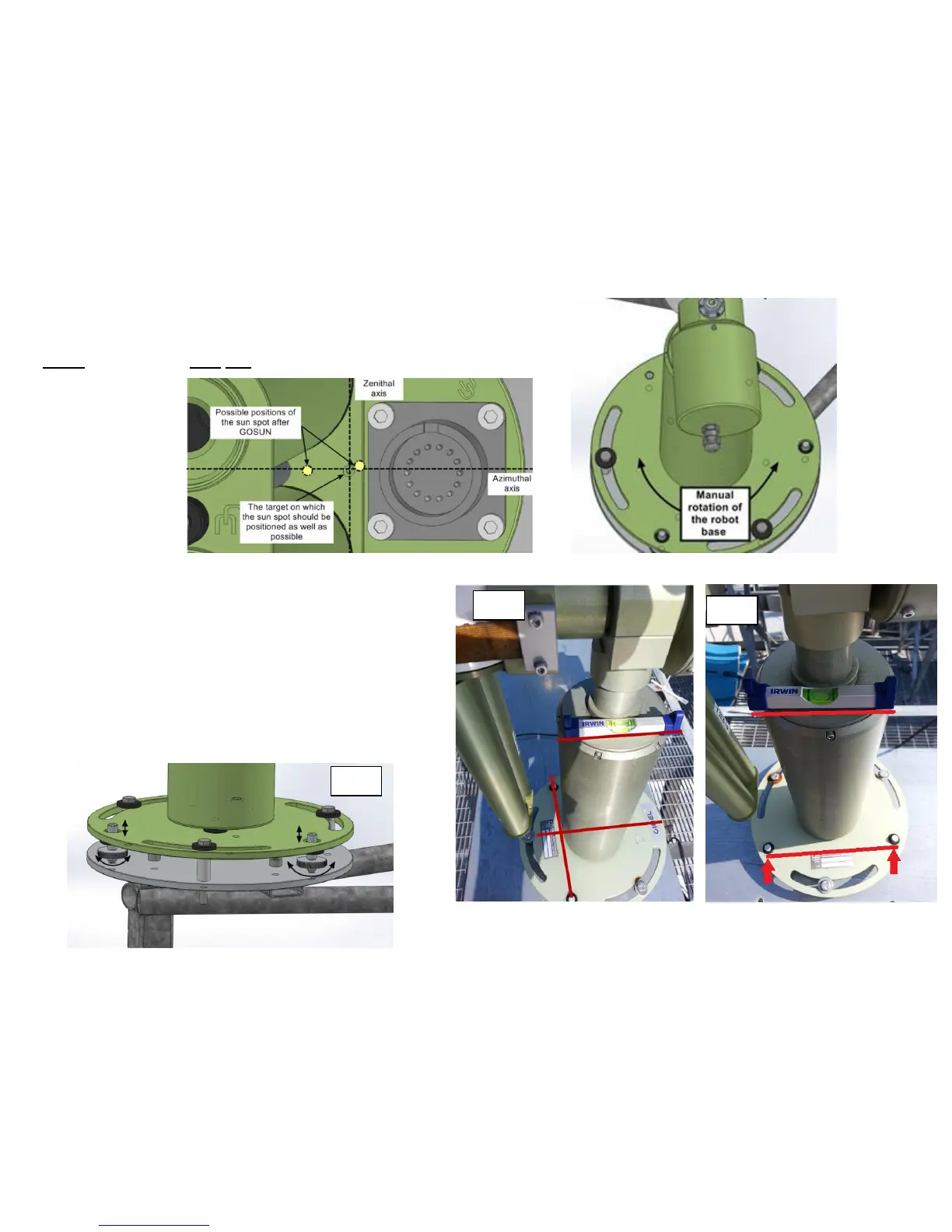
8. After a “GOSUN” scenario rotate the base of the robot
until the sun spot lines up to the target.
Note: The sun spot may not be centered on the target.
9. ROBOT LEVELING:
Without disturbing the sensor head, place the level
on the AZ housing. using both the adjusters on the
robot base (Fig. 1) adjust the level in the direction
that is perpendicular with the adjustable feet (Fig.2),
and then adjust the level in the direction that is
parallel with the adjustable feet (Fig.3). This will
ensure that robot is level in all directions.
Fig.1
Fig.3
Fig.2

 Loading...
Loading...