23
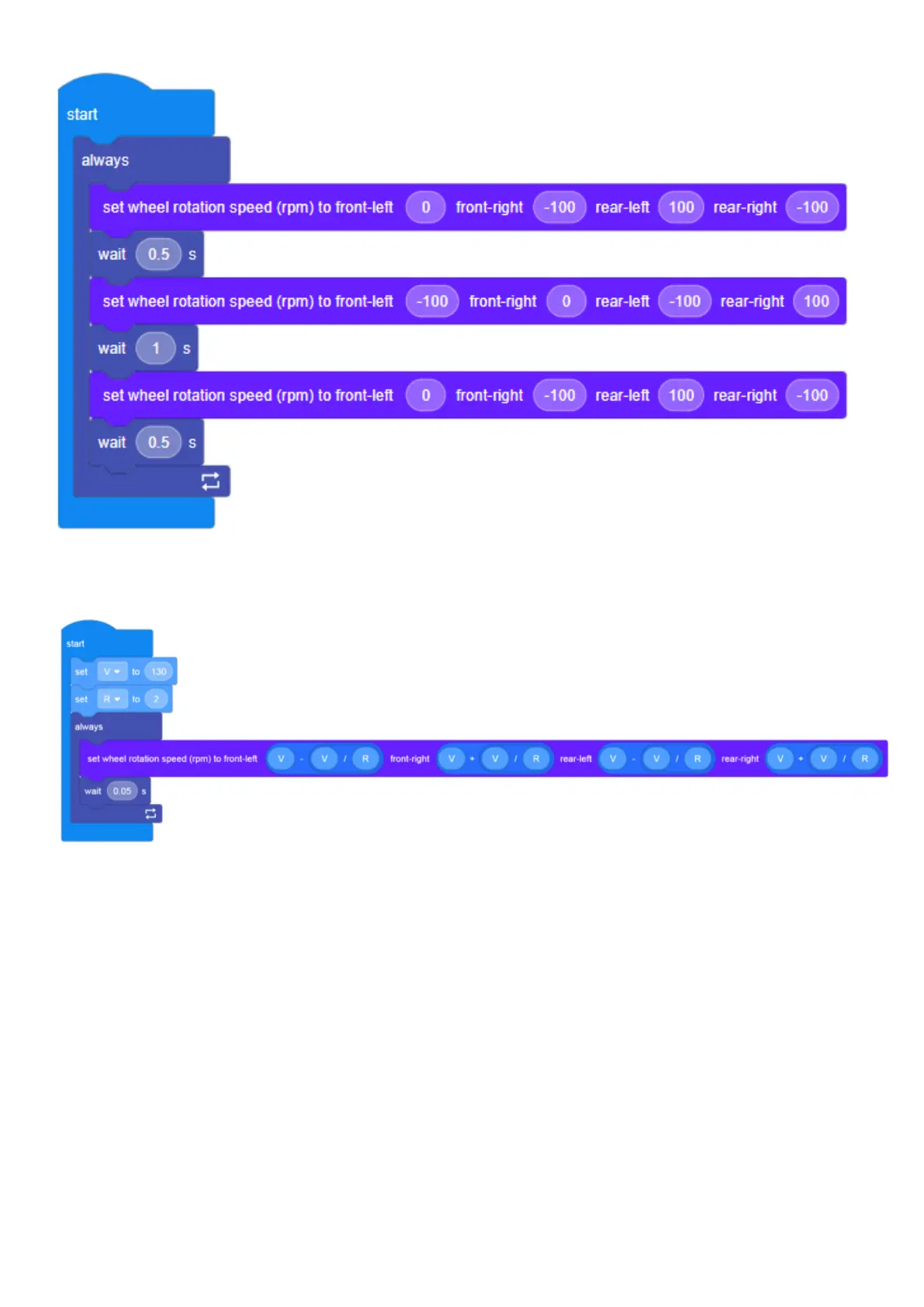
② Translating in a circle
This will control the robot to translate along a circular path.
Notes:
1) The robot will translate forward at the default rotation speed of 100 rpm for the front-left wheel, 100 rpm for the
front-right wheel, 100 rpm for the rear-left wheel, and 100 rpm for the rear-right wheel.
2) To determine a valid combination of wheel rotation directions and speeds,
push the robot manually to move it in the desired pattern and observe the rotational direction of each wheel; the rotation speed’s
value should be positive for wheels rotating forward and negative for wheels rotating backward.
For example:
When the robot translates to the right, the front-left wheel and rear-right wheel will rotate forward, so their rotation speed values
should be positive, while the front-right wheel and the rear-left wheel will rotate backward, so their rotation speed values should
be negative.