84
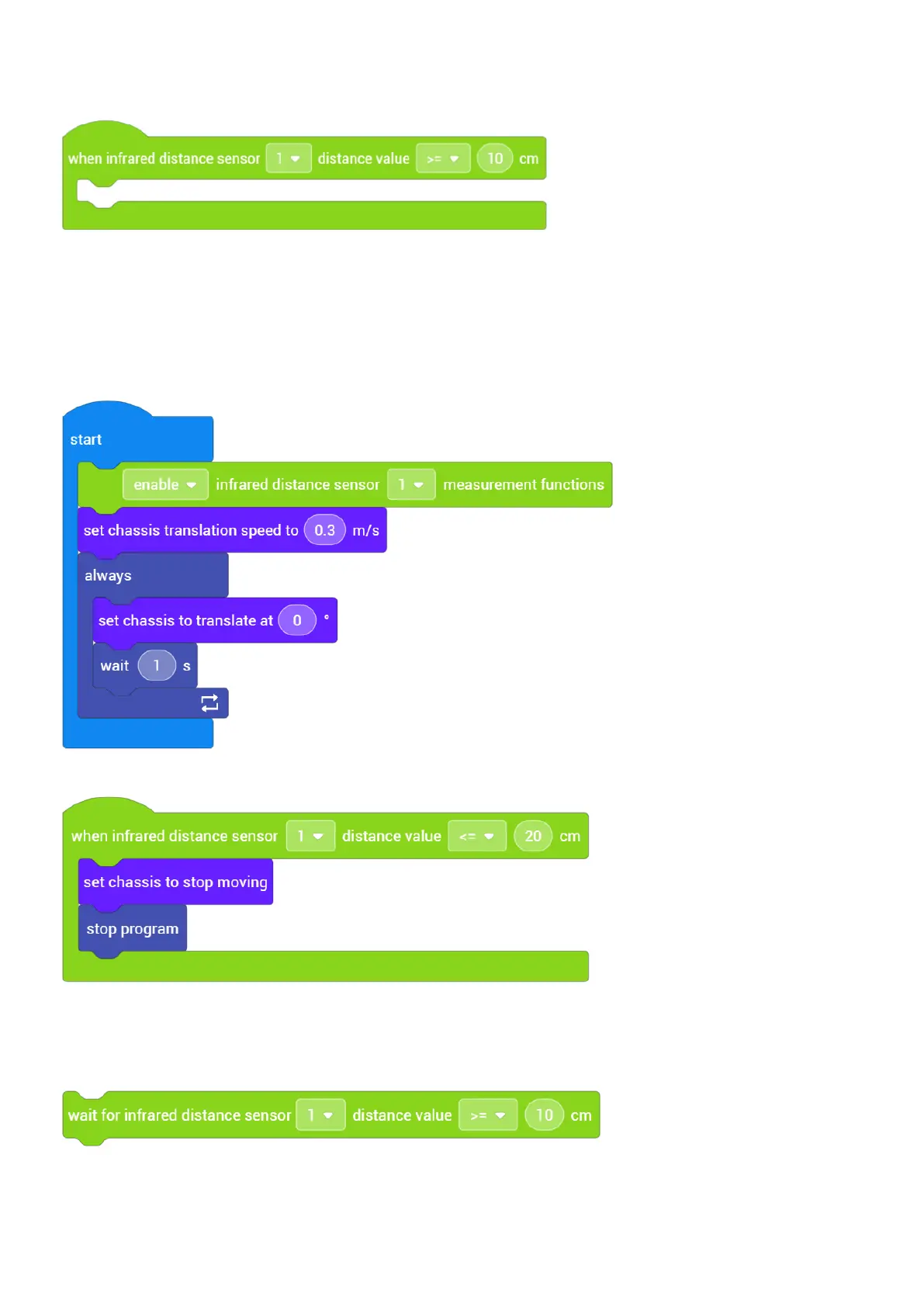
2. When infrared distance sensor No. (1) distance value (≥) (10) centimeters
(1) Description: Run the program in this module when the distance measured by the specified infrared distance sensor (No.)
meets the condition.
(2) Type: Event block
(3) Example: Continuously approaching
Control the robot mobile chassis so that it continuously translates towards the wall until the distance measured by the infrared
distance sensor is ≤ 20 cm, where it will then stop.
3. Wait for infrared distance sensor No. (1) distance value (≥) (10) centimeters
(1) Description: Execute the next instruction when the distance measured by the specified infrared distance sensor (No.) meets
the condition; otherwise, it will stay still and wait.