88
Notes:
1) The output level of the button can be high or low. When the button is “pressed” and “released”, the output level changes, and
the I/O pin of the sensor adaptor receives the level signal change so as to control the opening or closing of the gripper.
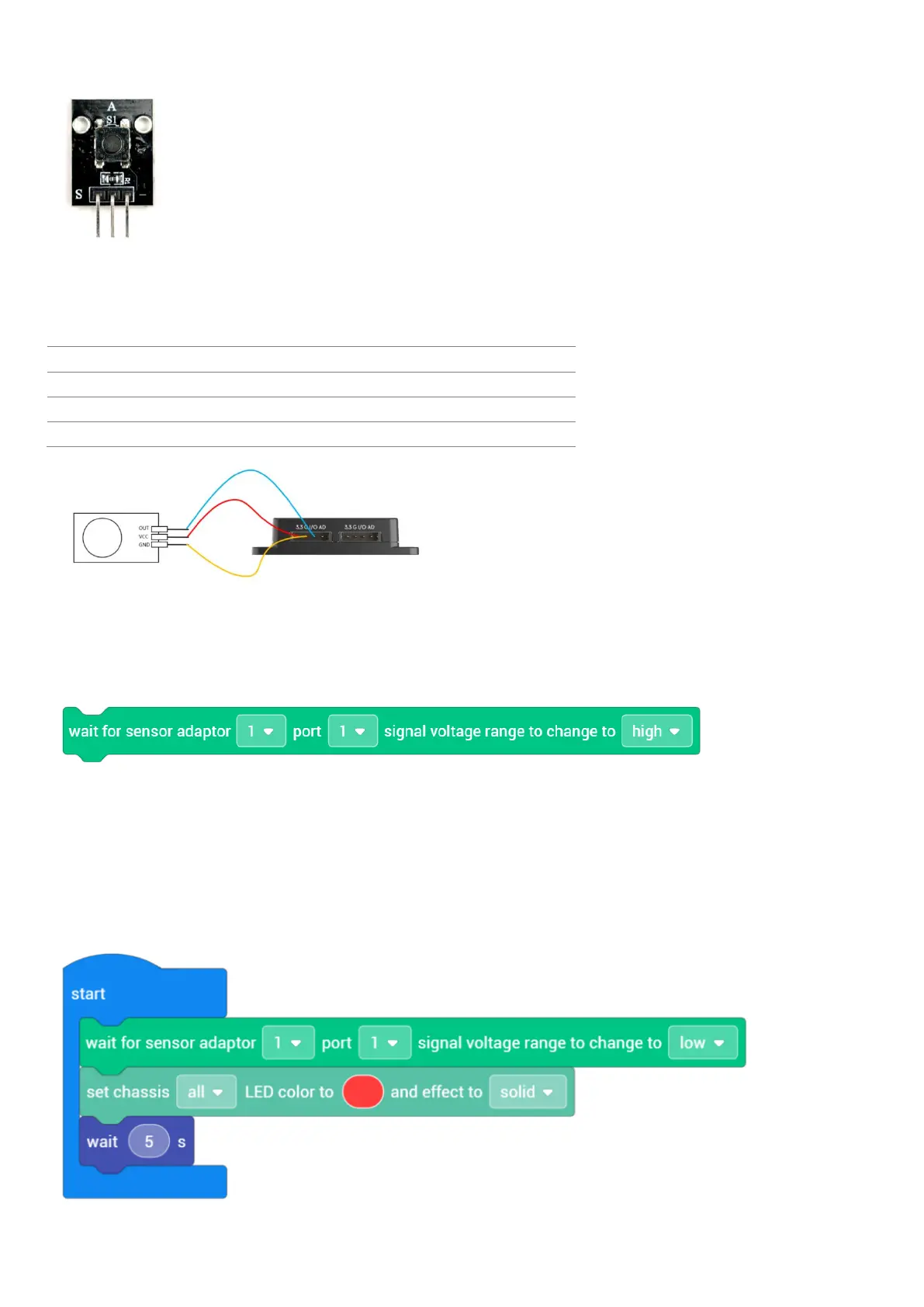
2) The three pins on the button need to be connected to the designated spots of the sensor adaptor through DuPont wires:
3) A maximum of six sensor adaptors can be connected to the robot at the same time.
2. Wait for sensor adaptor No. (1) port (1) signal voltage range to change to (high)
(1) Description: Execute the follow-up instructions when the I/O pin level of the specified port of the specified sensor adaptor
meets the conditions; otherwise it will continue to wait.
(2) Type: Execution, Blocking block
(3) Example: Give a warning when the decibel level is too high
After a sound sensor is connected to sensor adaptor No. (1), if the detected sound is too loud, the chassis LED indicator will turn
solid red.