114
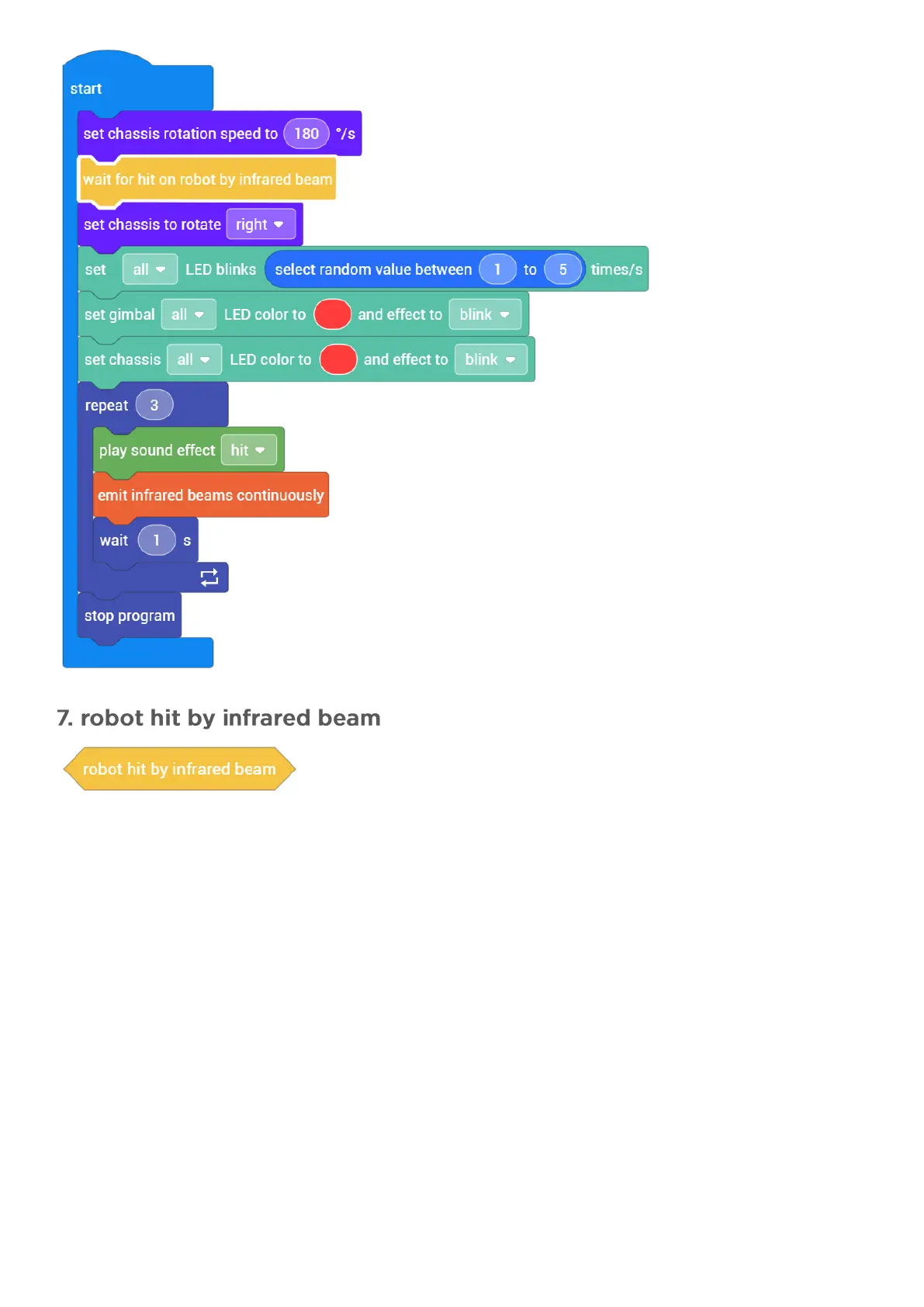
(1) Description: Check whether the infrared sensors on both sides of the robot's gimbal have been attacked
by infrared beams. Returns "True" if yes; otherwise, returns "False".
(2) Return value: Boolean
(3) Example: Number of hits
If the robot is attacked by an infrared beam, a "hit" sound is played and the number of hits is accumulated.