180
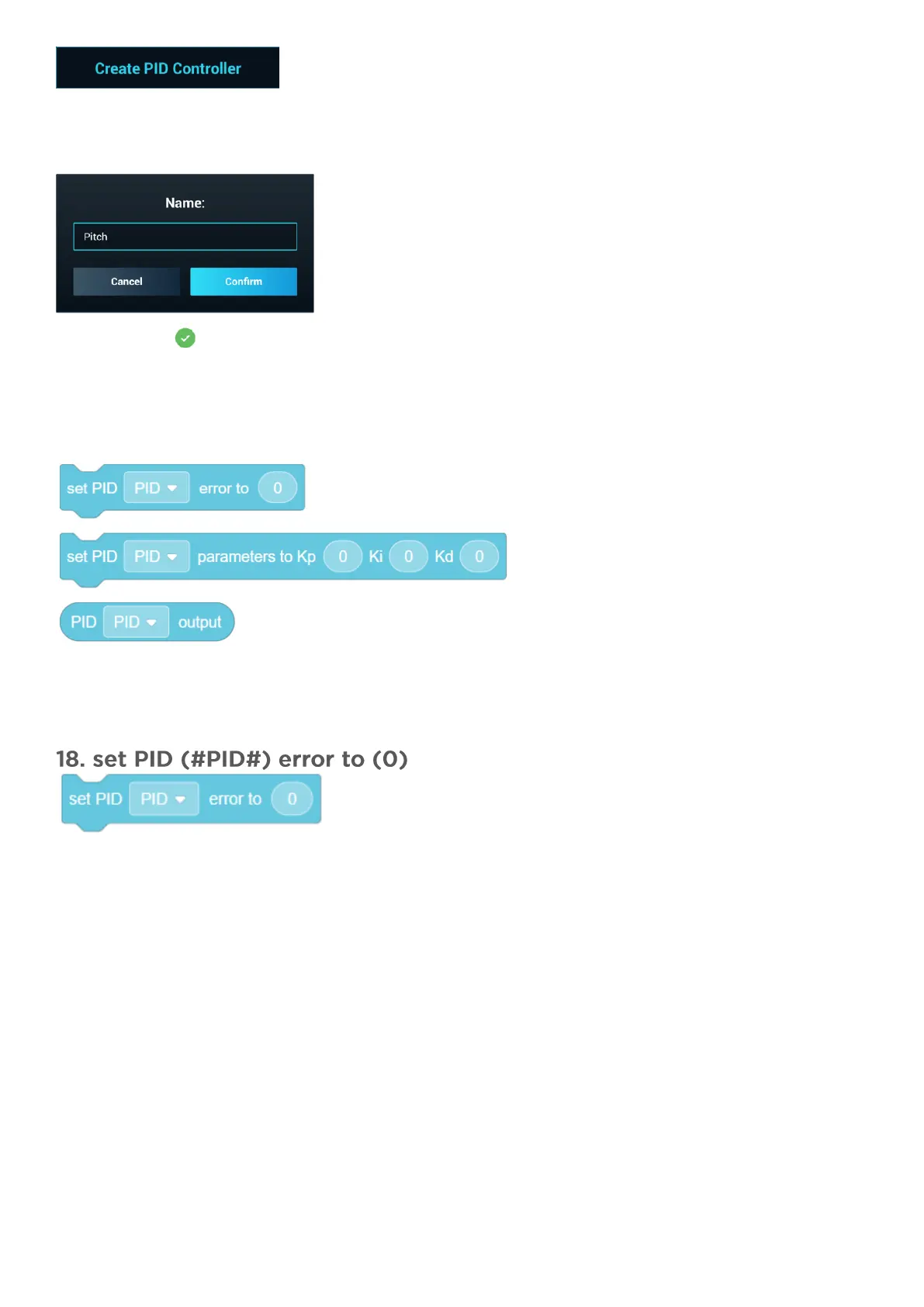
(1) Objective: Creates and names a PID controller
(2) Type: Settings block
(3) Example: Name controller
Note:
After the controller is created, there will be three modules available to configure error settings, adjust
parameters, and obtain output information.
Python API:
Class: rm_ctrl.PIDCtrl()
(1) Objective: Sets the PID controller error, which is the difference between the target and returned values
(2) Type: Settings block
(3) Example: Follow a Vision Marker
Manually hold and move a Vision Marker to control the gimbal’s movement to follow.
This will set the PID controller error, which is the difference between the center of the Vision Marker and
the center of the robot's field of view.