182
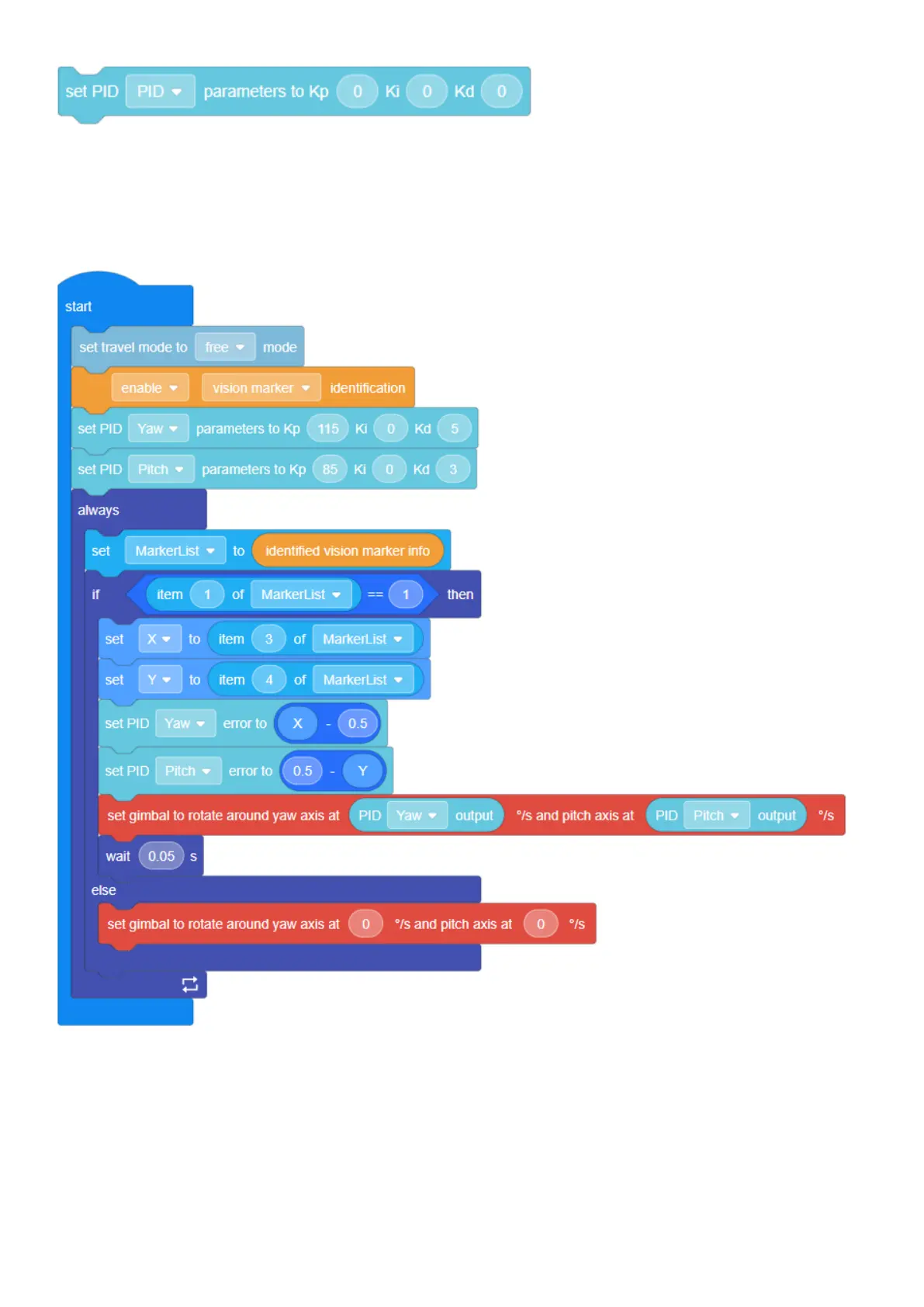
(1) Objective: Adjusts the PID parameters; Kp is the proportional coefficient, Ki is the integral coefficient,
and Kd is the differential coefficient.
(2) Type: Settings block
(3) Example: Follow Vision Marker
Modify parameters of Kp, Ki, and Kd to optimize the closed-loop control system.
Note: