51
(1) Objective: Sets the gimbal to rotate along yaw axis to a designated position
(2) Type: Execution block
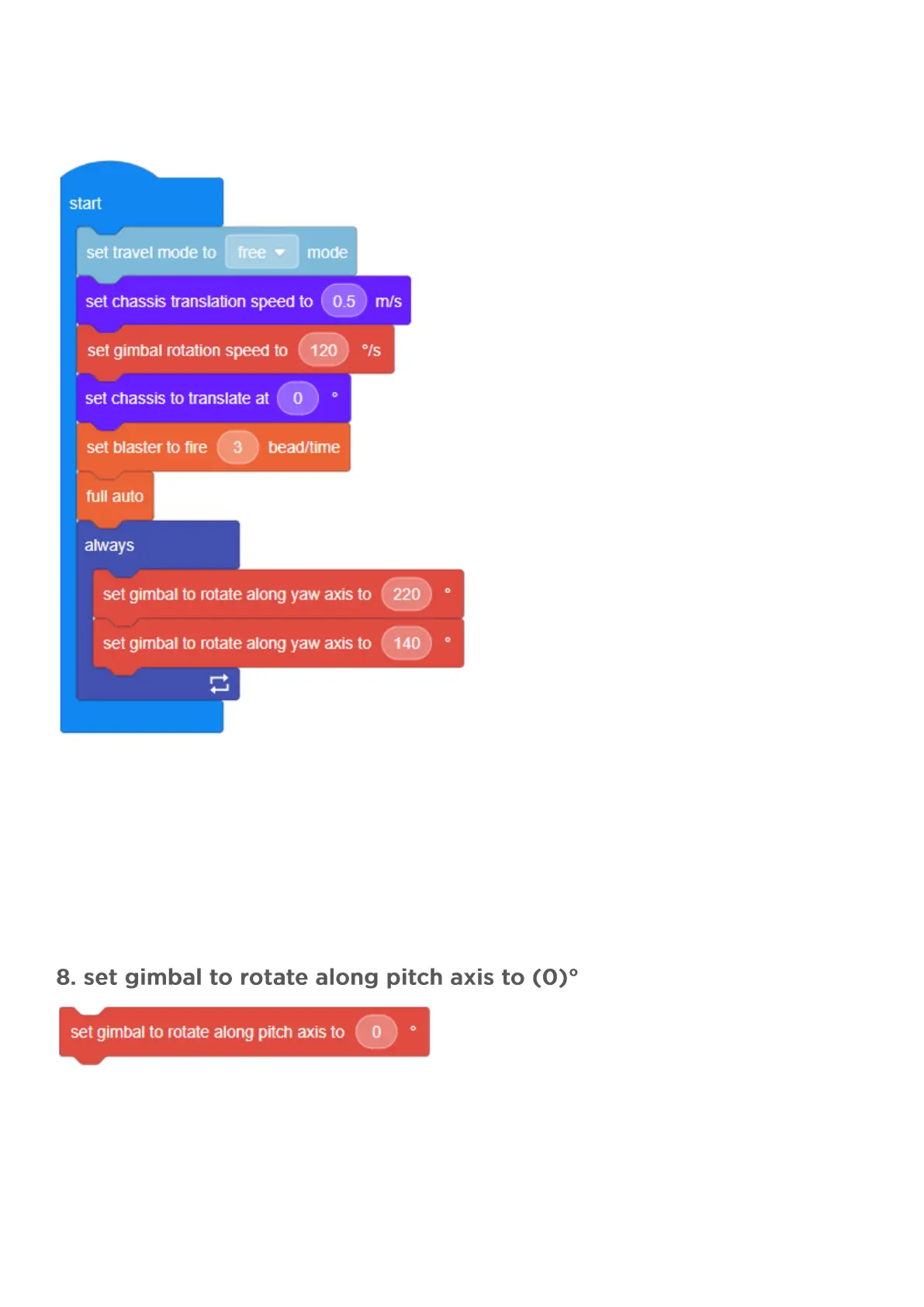
(3) Example: Configure rear gun
This will set the chassis to translate forward while the gimbal continuously fires shots behind it.
Note:
1) In Chassis Lead mode this block is not available.
2) The gimbal will rotate left and right along the yaw axis and up and down along the pitch axis.
Python API:
Function: gimbal_ctrl.yaw_ctrl(degree)
Parameters:
● degree(int): [-250, 250]°
(1) Objective: Sets the gimbal to rotate along pitch axis to a designated position
(2) Type: Execution block
(3) Examples: Simulate the power on process, Follow arrow markers
①Simulate power on process
This will simulate the power on process for the robot.