6
In free mode, the "set chassis to follow gimbal at (0) ° "and “set gimbal to follow chassis at (0)° ”blocks will not
be able to take effect.
Python API:
Function: robot.set_mode(mode_enum)
Parameters:
● mode_enum(enum)
■ rm_define.robot_mode_gimbal_follow
■ rm_define.robot_mode_chassis_follow
■ rm_define.robot_mode_free
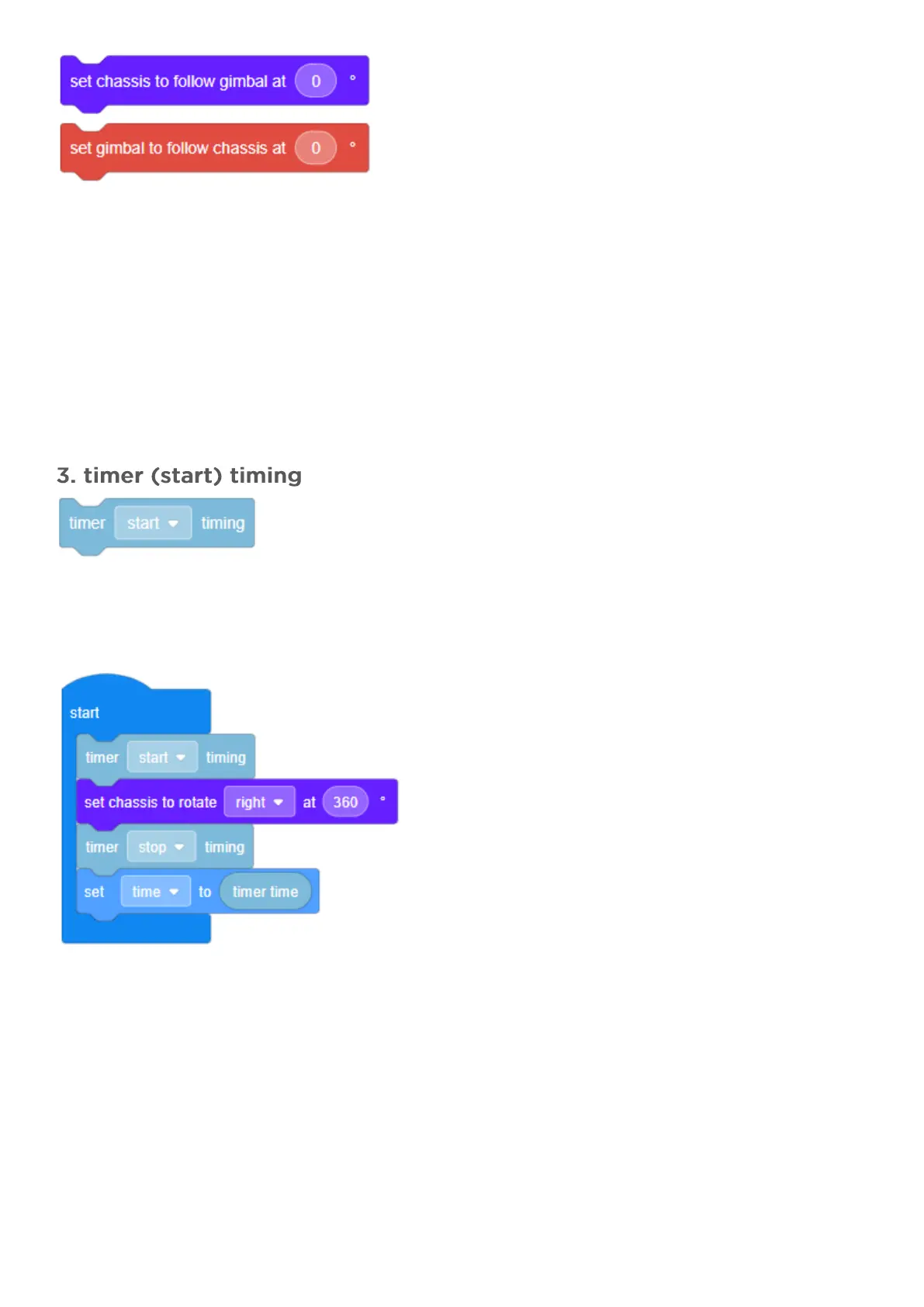
(1) Objective: Starts, pauses, or stops the timer
(2) Type: Execution block
(3) Example: Time a rotation
This measures the time it takes the chassis to complete one full rotation
You can check details using the FPV window: