84
■ rm_define.exposure_value_small
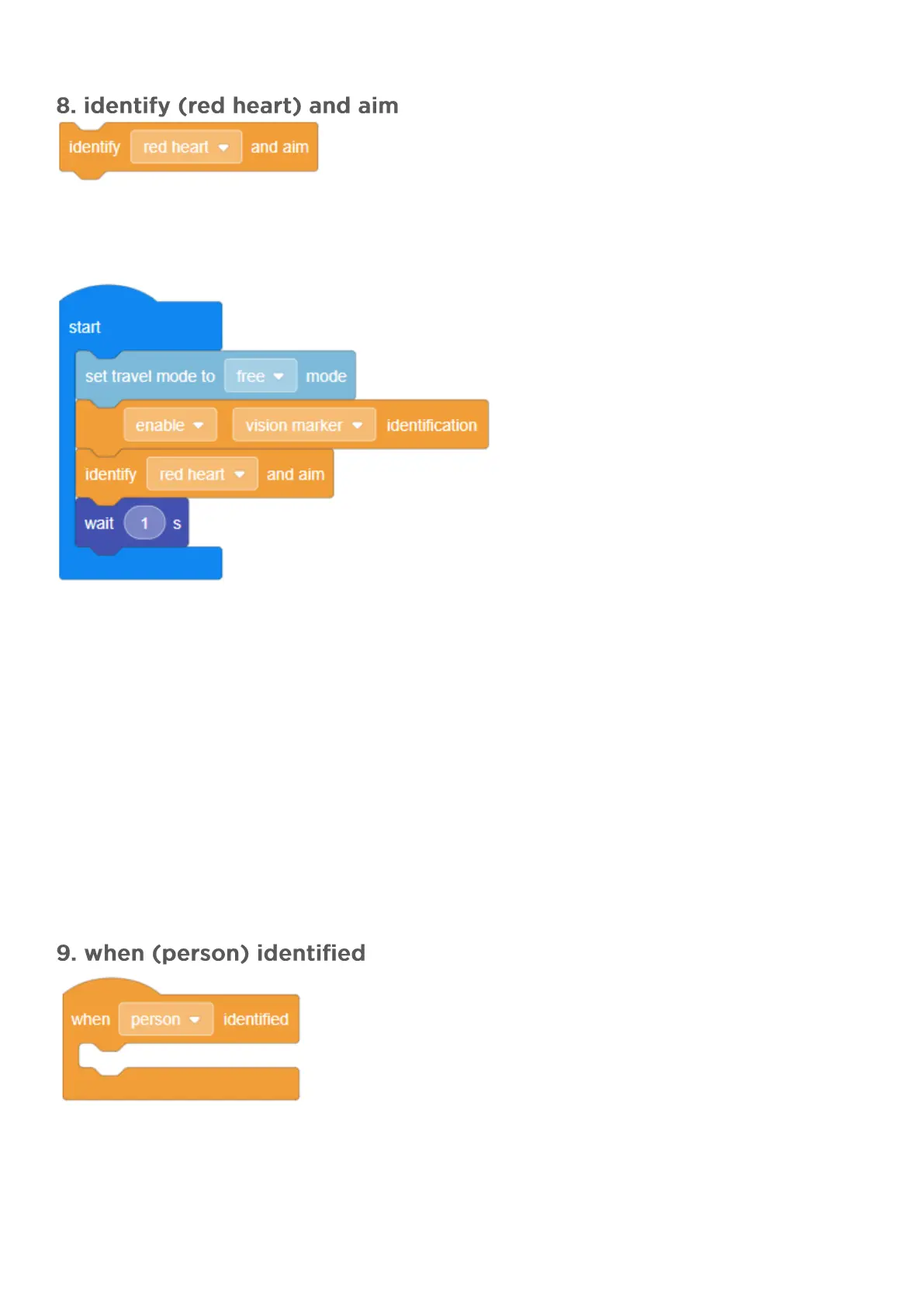
(1) Objective: Sets the robot to identify and aim at the central position of the corresponding Vision Markers
(2) Type: Execution block
(3) Example: Set robot to aim at the red heart
Note:
1)You must enable Vision Marker identification for the robot to be able to identify Vision Markers.
2)In this block, when the robot identifies a red heart, it will automatically aim toward it; if the robot fails to
identify the red heart within five seconds, it will exit the program and run the next program.
Python API:
Function: vision_ctrl.detect_marker_and_aim(marker_enum)
Parameters:
● rm_define.marker_trans_red_heart
● rm_define.marker_trans_target
● rm_define.marker_trans_dice
● rm_define.marker_number_[zero,..., nine]
● rm_define.marker_letter_[A,..., Z]
(1) Objective: Sets the corresponding block to run its internal program when specified information is
identified
(2) Type: Event block
(3) Examples: Indicate turn, Control attitude