Commissioning Waterpilot FMX21
56 Endress+Hauser
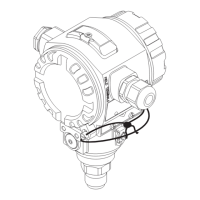
Adjustment of the level sensor (Waterpilot)
1 Select the "Level" measuring mode via the "Measuring mode" parameter.
Menu path: Setup → Measuring mode
L
WARNING
Changing the measuring mode affects the span (URV)
This situation can result in product overflow.
‣
If the measuring mode is changed, the setting for the span (URV) must be checked in the "Setup"
operating menu and readjusted if necessary.
2 Select a pressure unit via the "Press. eng. unit" parameter, here "mbar" for example.
Menu path: Setup → Press. eng. unit
3 The sensor is unpressurized, perform a position adjustment → 40
4 Set the output current to "Fixed" 4.0 mA via the "Current Mode" parameter.
Menu path: Expert → Communication → HART config
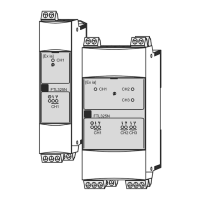
5 Configure an address ≠0 using the "Bus address" parameter, e.g. bus address = 2.
(HART 5.0 master: Range 0 to 15, where address = 0 calls up the "Signaling" setting; HART 6.0 master:
Range 0 to 63)
Menu path: Expert → Communication → HART config
6 Activate the reading of a value sent externally in burst mode via the "Electr. delta P" parameter.
Menu path: Expert → Application
7 Perform level adjustment (wet or dry)
8 Result: The measured value output by the atmospheric pressure sensor equals the level in the deep well
(differential signal) and can be read out by means of a HART request for the address of the atmospheric
pressure sensor.
• It is not permissible to reverse the assignment of the measuring points to the direction of
communication.
• The measured value of the transmitting device (via burst) must always be greater than
the measured value of the receiving device (via "Electr. Delta P" mode).
• Adjustments that result in an offset of the pressure values (e.g. position adjustment,
trim) must always be performed in accordance with the individual sensor and its
orientation and independently of the "Electr. Delta P" application.
• Other settings result in non-permitted use of the "Electr. Delta P" mode and can lead to
incorrect measured values.
9.11 Automatic density compensation
9.11.1 Automatic density compensation with the internally measured
sensor temperature
Example:
In this example, a Waterpilot FMX21 is used for level measurement in water. The change
in the water density caused by changing temperatures is automatically factored into the
level signal by activating the automatic density compensation.

 Loading...
Loading...