The Festo_PartDetector.lib library
8
1.5.2 CheckOpti project
After preparing the Compact Vision System SBO...-Q, use the CheckOpti program to create a check
program for detecting parts ( CheckOpti documentation).
Configuring the characteristics for detecting the part position
• Add tools to the check program so that the required (characteristic) values are calculated.
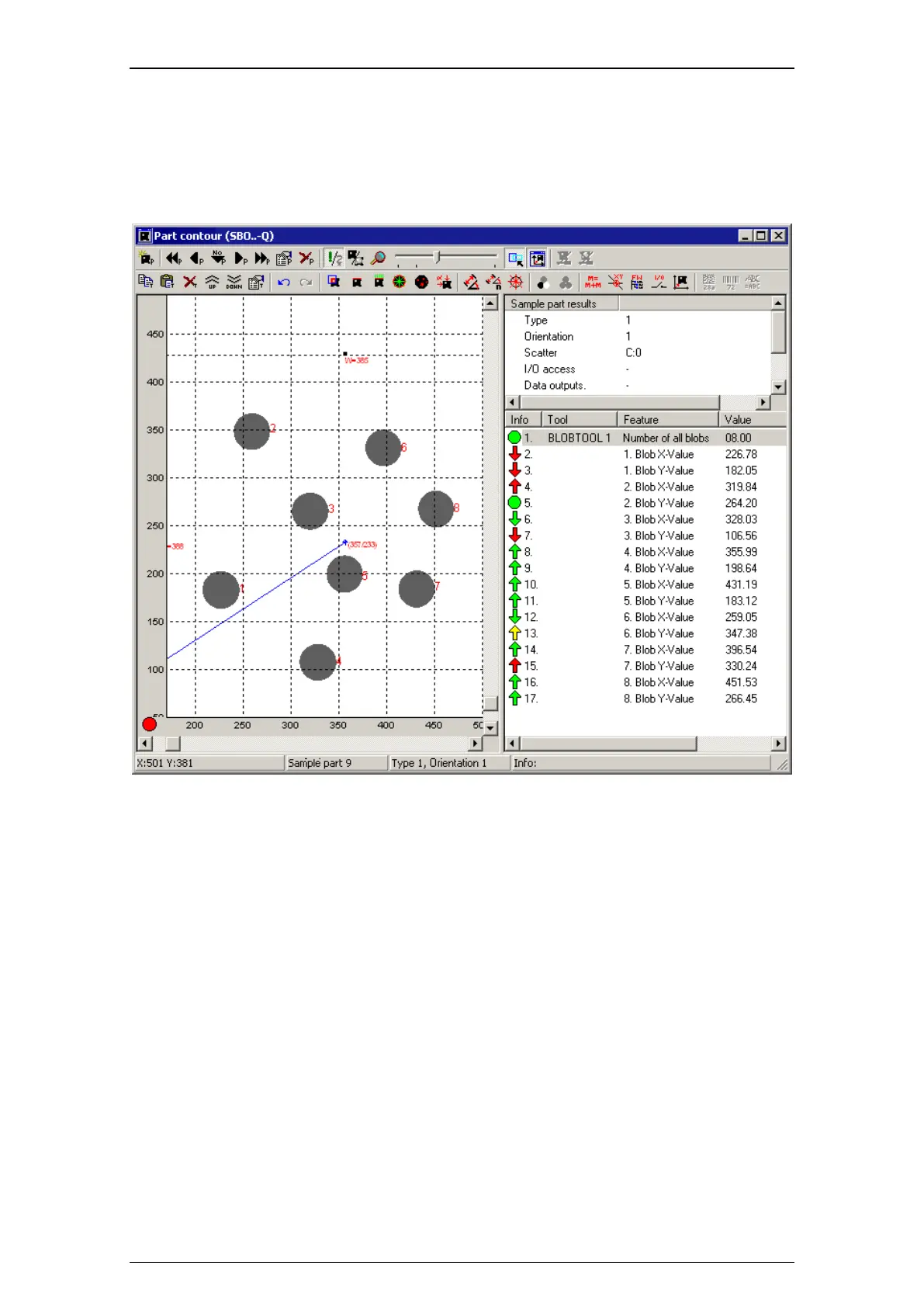
Figure: Setting the system parameters
These characteristics can be calculated using the "Blobfinder" or "Patternmatching" tool, for example.
Converting the part position characteristics to global coordinates
The part position (i.e. characteristics of X/Y coordinates or rotation angles) is first determined (in pixels) by
the Compact Vision System in the camera coordinate system. These characteristics must then be
converted to the global coordinate system (e.g. unit mm) for use in the "PartDetector" module. These
characteristics are converted automatically if:
– the project property "Project with automatic transformation of features" is activated or
– the "Coordinate transformation" tool was added to the check program.
Configuring the data output "Telnet – SBOx-Q Part Detector"
A data output of type "Telnet – SBOx-Q Part Detector" must be configured for the creation and transfer of
the dataset (part position etc.) to the "PartDetector" module. This is added to the check program and
configured in the "Data output" window during creation of the check program. The "Settings" tab contains
basic configuration settings that must be made, e.g. the byte order setting "Big-Endian" for controllers of
type CECX and CMXR.

 Loading...
Loading...







