6Functions
68 Festo – GDCP-CMMP-M0-FW-E N – 1304NH
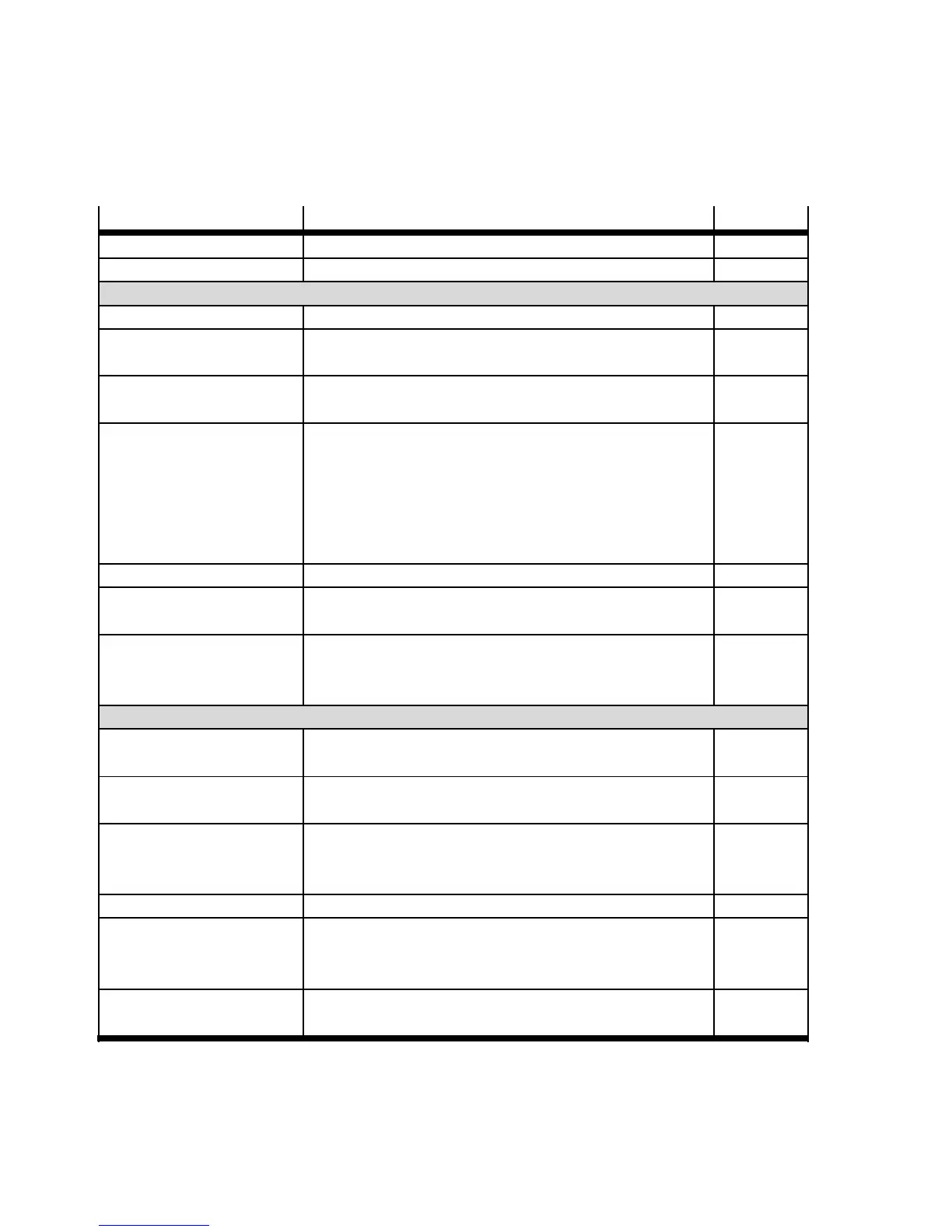
Function of the digital outputs
The function can be determined for the available outputs DOUT1, DOUT2 and DOUT3 as follows:
Function
Description Polarity
Off The output is always low. –
On The output is always h igh. –
Group “Enabled”
Brake vented The output is ac tive as soon as the brake is released. High active
Output stage active The output is ac tive if the output stage enable has been
granted (power enable present, mo tor energised).
High active
Setpoint lock active The output is ac tive as soon as one or both setpoint locks
is triggered by a limit switch.
High active
Linear motor identified This output is active if the c ommutation position has
been found. For angle encoders without commutation
signals, the commutation position is determined by
means of an automatic function. Starting a posit io ning
movement, for example, only makes sense onc e this
process is complete.
High active
Reference position valid The output is active if the drive is homed. High active
Collective status
Ready for controller enable
Signals the status that no error is present and the motor
controller is ready for controller enable.
High active
Output stage release level Returns the level of the output stage enable digital in-
put DIN4. The condition is fulfilled if the level at
DIN4 = HIGH.
High active
Group “Movement”
Position Xsetpoint = Xdest The setpoint position is within the tolerance window of
the target position.
High active
Position Xact = Xdest The actual position is within the tolerance window of the
target position.
High active
Remaining Distance The output is active if the deviation between the target
and actual position has fallen below the set v alue for the
remaining distance message.
High active
Reference run active The output is active as long as homing is active. High active
Reference speed reached The actual speed corresponds to the parame terised
comparison speed in the “Speed reached” message,
taking into consideration the specified tolerance window.
High active
Following error The deviation between the nominal and actual position
exceeds the set value.
High active

 Loading...
Loading...










