6Functions
Festo – GDCP-CMMP-M0-FW-E N – 1304N H 69
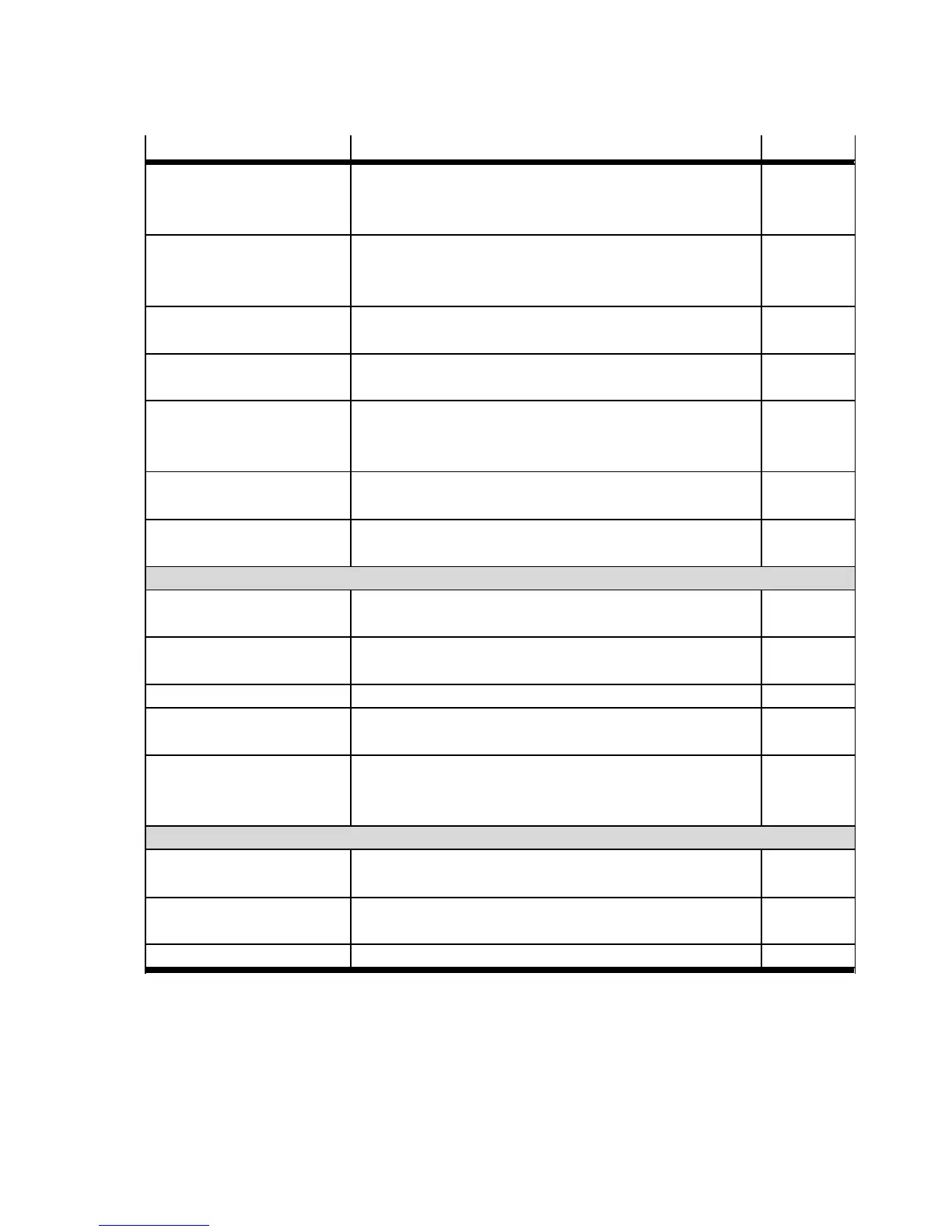
Function PolarityDescription
Alternative target reached This output is active if a positioning movement has been
terminated, for example by reaching a comparison
torque. The condition Xact = Xdest is then not satisfied.
High active
Comparison torque
reached
The actual torque corresponds to the comparison torque
parameterised in the “Torque reached” message, taking
into consideration the specified tolerance window.
High active
Acknowledge for start
positioning
Start-Ack (low active) High active
Destination reached with
handshake
Destination reached with handshake for the dig. start.
The output is not set as long as START is on H IGH level.
High active
Speed 0 The output is active if the actual speed is equal to 0.
The tolerance window is the message window for the
message “Speed 0”.
High active
MC
1)
=0: Positioning job active
=1: Positioning job completed, possibly with error
High active
Active when positioning
record running
Signals that a positioning record is currently being
executed.
High active
Cam disc (CAM)
Cam disc active The output is ac tive as soon as a cam disc has been
activated.
High active
CAM-IN movement in
operation
The output is ac tive as soon as a CAM-IN movement is
executed.
High active
CAM-CHANGE Like CAM-IN, but for a change between 2 cam discs. High active
CAM-OUT movement in
operation
The output is active from deactivation of a cam disc until
the final standstill of the drive.
High active
Cam disc start point
reached
The output is ac tive if the start position of the selected
cam disc is reached. The tolerance window is the
message window fo r the message “Target reached”.
High active
Error
I
2
t motor monitoring
active
The output is ac tive as soon as the motor or output stage
workload is in the critical range.
High active
Undervoltage
intermediate circuit
The output is active if an undervoltage occurs in the
intermediate circuit.
High active
Common erro r active Signals that one or more errors are active. High active
1) When a cam disc is active, the MC signal always relates to the movement of the master (physical or virtual), i.e. to the setpoint
for the active cam disc.

 Loading...
Loading...










