4 EtherCAT interface
52 Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English
Telegram protocol Description Reference
Mailbox This transfer type is used to transmit the Service
Data Objects (SDOs) defined under CANopen.
They are transmitted to EtherCAT in SDO frames.
chapter 4.8
“SDO Frame”
Process Data This transfer type is used to transmit the Process
Data Objects (PDOs) defined under CANopen,
which are used to exchange cyclic data. They are
transmitted to EtherCAT in PDO frames.
chapter 4.9
“PDO Frame”
Tab. 4.6 Telegram protocol – description
In general, these two transfer types allow all PDOs and SDOs to be used exactly as they are defined for
the CANopen protocol for CMMP-AS-...-M3.
However, parametrisation of PDOs and SDOs for sending objects via EtherCAT is different from the
settings which must be made under CANopen. In order to link the CANopen objects to be exchanged via
PDO or SDO transfers between masters and slaves into the EtherCAT protocol, a so-called Sync
Manager is implemented under EtherCAT.
This Sync Manager is used to link the data of the PDOs and SDOs to be sent to the EtherCAT telegrams.
To accomplish this, the Sync Manager provides multiple Sync channels which can each implement a
CANopen data channel (Receive SDO, Transmit SDO, Receive PDO or Transmit PDO) on the EtherCAT
telegram.
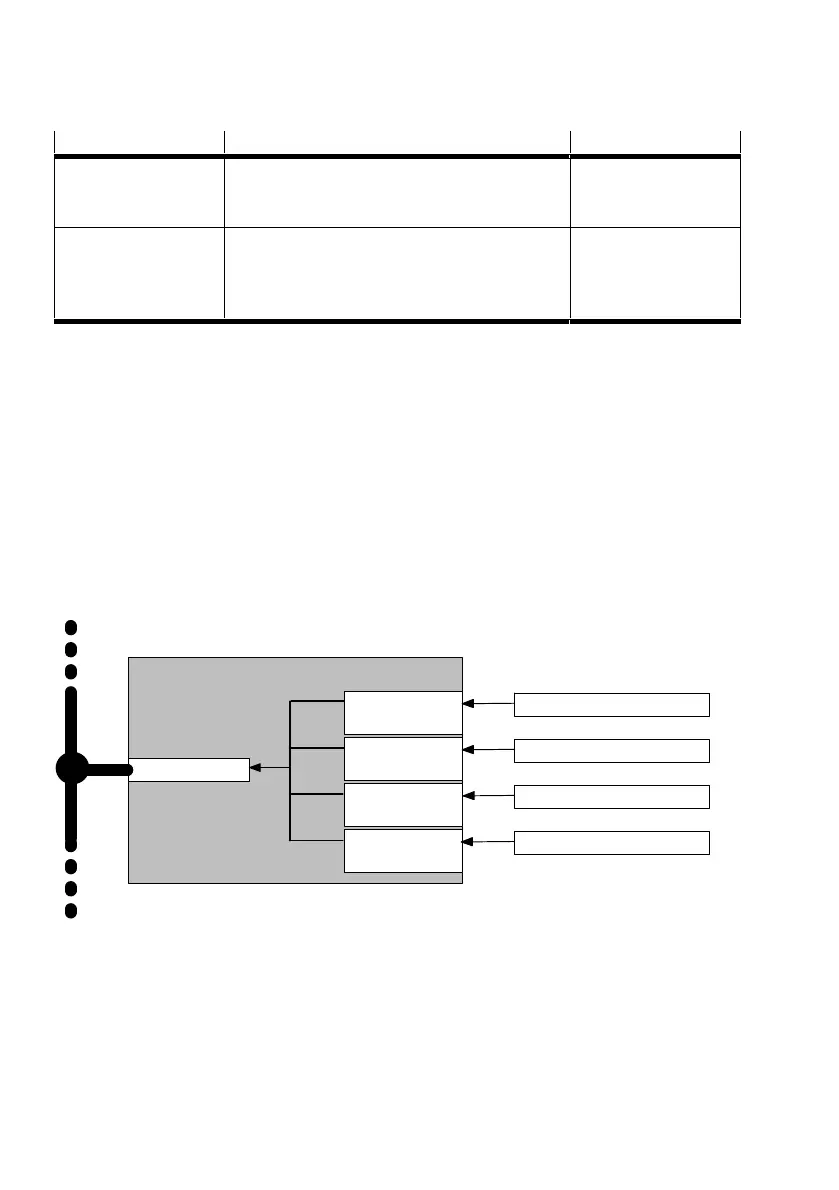
The figure shows how the Sync Manager is linked to the system:
EtherCAT Bus
SYNC
channel 0
SYNC
channel 1
SYNC
channel 2
SYNC
channel 3
Receive SDO
Transmit SDO
Receive PDO (1/2/3/4)
Transmit PDO (1/2/3/4)
Fig. 4.2 Sample mapping of the SDOs and PDOs to the Sync channels
All objects are sent via so-called Sync channels. The data from these channels are automatically linked
to the EtherCAT data flow and transmitted. The EtherCAT implementation in the motor controller
CMMP-AS-...-M3 supports four such Sync channels.
For this reason, additional mapping of the SDOs and PDOs to the Sync channels is required compared
with CANopen. This occurs via the so-called Sync Manager objects (objects 1C00
h
and 1C10
h
… 1C13
h
chapter 4.6.2). These objects are described in more detail below.

 Loading...
Loading...










