5 Setting parameters
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English 85
The calculation of the velocity_encoder_factor uses the following equation:
velocity_encoder_factor +
numerator
divisor
+
gear_ratio * time_factor_v
feedconstant
The velocity_encoder_factor must not be greater than 2
24
Like the position_factor, the velocity_encoder_factor also has to be written to the motor controller
separated into numerators and denominators. This can make it necessary to bring the fraction up to
whole integers by expanding it accordingly.
EXAMPLE
First, the desired unit (column 1) and the desired number of decimal places (dp) have to be specified,
along with the application's gear ratio and its feed constant (if applicable). The feed constant is then
displayed in the desired positioning units (column 2). Then the desired time unit is converted into the
time unit of the motor controller (column 3).
Finally all values can be entered into the formula and the fraction can be calculated:
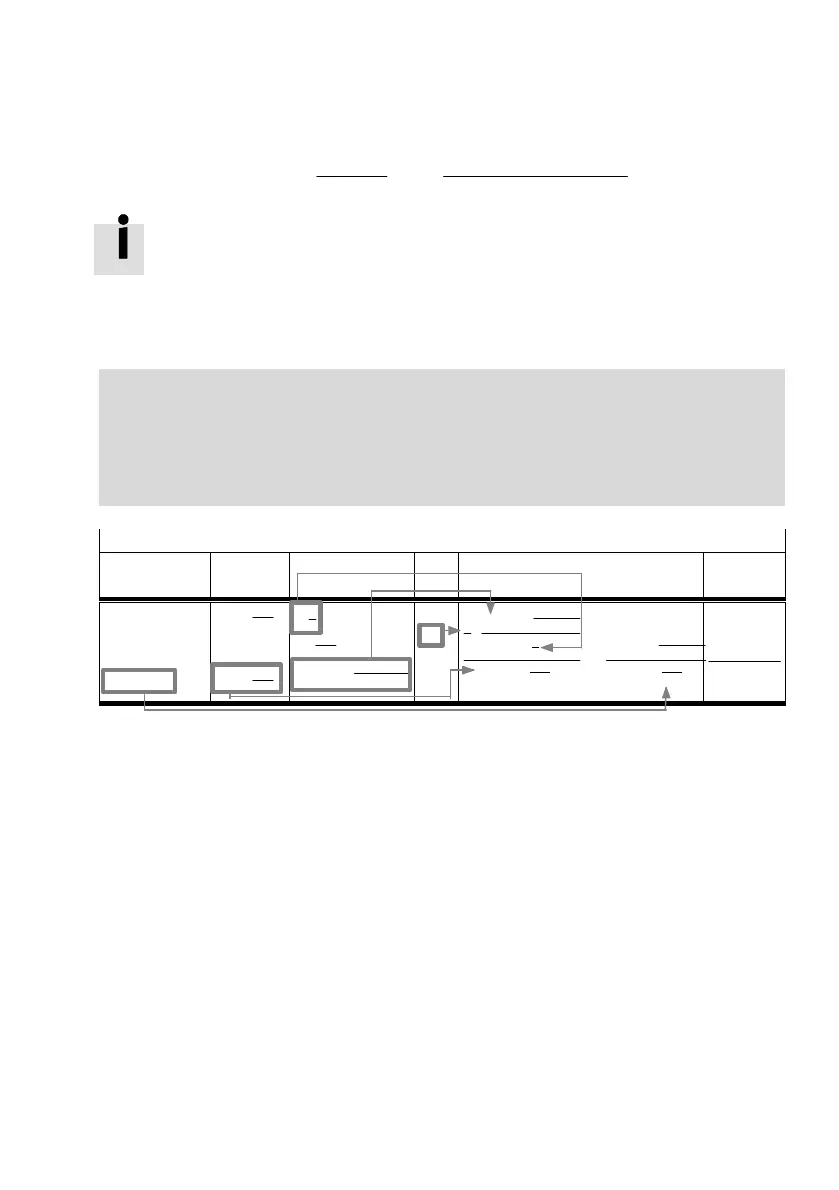
Velocity factor calculation sequence
Speed
units
Feed
const.
Time Constant Gear Formula Result
shortened
mm/s,
1 DP
1/10
mm
/
s
(
mm
/
10
s
)
63.15
mm
R
å
1R
OUT
+
631.5
mm
10
1
1
s
+
60
1
min
+
60 * 4096
1
4096 min
4/5
4
5
*
60*4096
1
4096 min
1
1
s
631.5
mm
10
+
1966080
1
4096 min
6315
mm
10s
num:131072
div:421
Fig. 5.5 Velocity factor calculation sequence

 Loading...
Loading...










