5 Setting parameters
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English 97
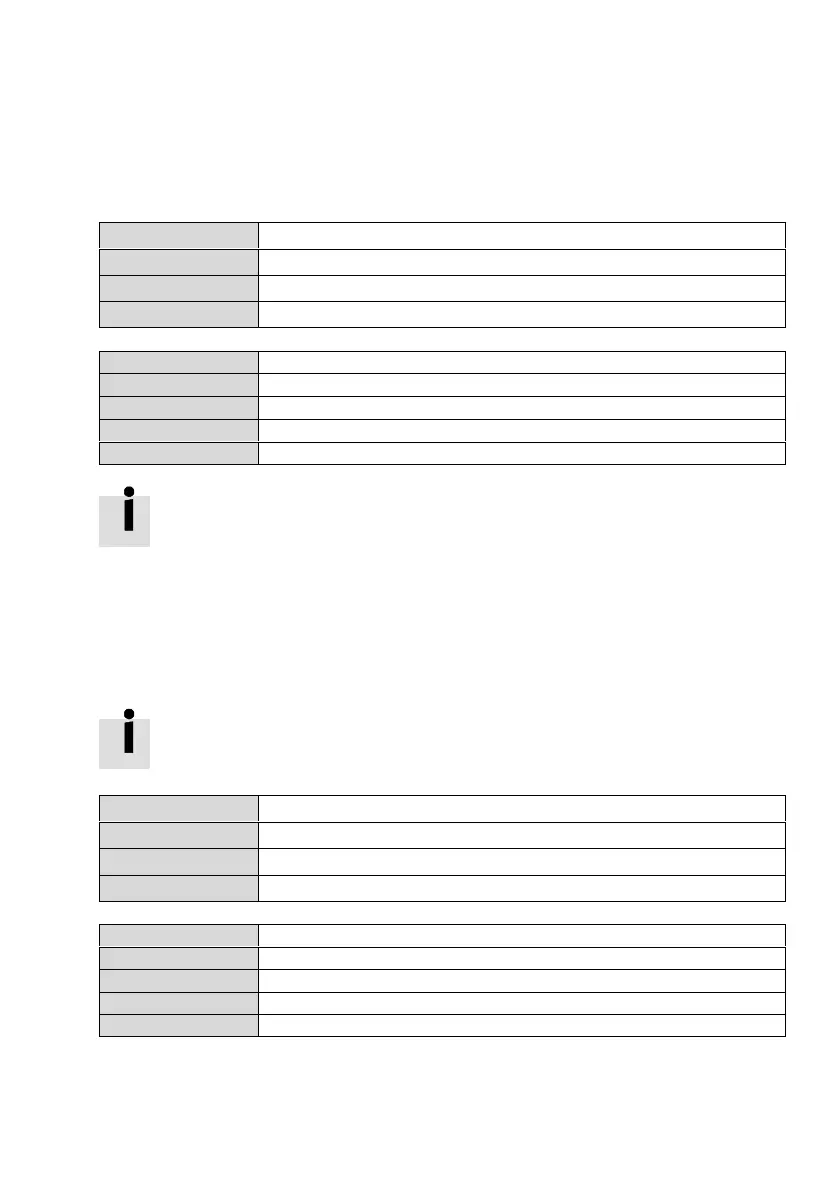
Object 6075
h
: motor_rated_current
This value can be taken from the motor rating plate and is entered in milliamperes. The effective value
(RMS) is always assumed. No current can be specified above the motor controller nominal current
(6510
h
_40
h
: nominal_current).
Index 6075
h
Name motor_rated_current
Object Code VAR
Data Type UINT32
Access rw
PDO mapping yes
Units mA
Value Range 0 … nominal_current
Default Value 296
If the object 6075
h
(motor_rated_current) is written over with a new value, the object
6073
h
(max_current) must always be parametrised again.
Object 6073
h
: max_current
As a rule, servo motors may be overloaded for a certain time period. With this object, the maximum
permissible motor current is set as a factor. It refers to the nominal motor current (object 6075
h
: mo
tor_rated_current) and is set in thousandths. The range of values is limited upward by the maximum
controller current (object 6510
h
_41
h
: peak_current). Many motors may be overloaded briefly by a
factor of 4. In this case, the value 4000 is written into this object.
The object 6073h (max_current) may only be written over if the object 6075h
(motor_rated_current) was previously overwritten.
Index 6073
h
Name max_current
Object Code VAR
Data Type UINT16
Access rw
PDO mapping yes
Units per thousands of rated current
Value Range –
Default Value 2023

 Loading...
Loading...










