6
trapuls – EtherCAT® Fieldbus Interface
Chapter 2 – Basic information about EtherCAT®
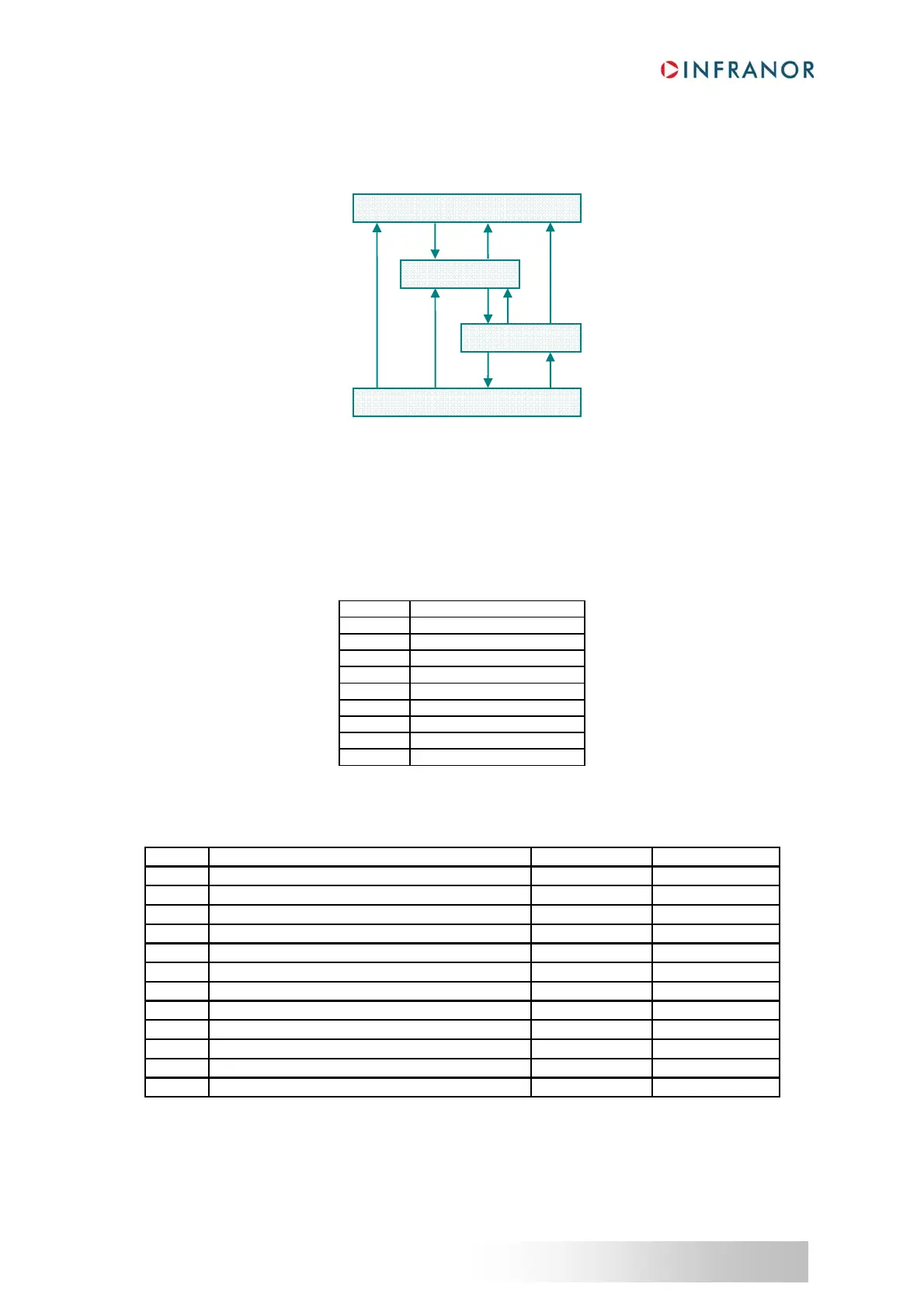
2.2 - ETHERCAT® STATE MACHINE
The EtherCAT® master controls the following state machine in every slave:
Description of the states and the transitions:
State Description
Init Initial state at the power on. Amplifier configuration is performed. No communication.
Pre-Op
SM0 and SM1 are active : SDO exchange is possible.
Safe-Op SM0, SM1, SM3 are active : SDO and TPDO exchange is possible. DC generates event.
Operational SM0, SM1, SM2 and SM3 are active : SDO, TPDO and RPDO exchange is possible. DC generates event.
Transition Actions
IP
Start SDO
PI Stop SDO
PS Start TPDO
SP Stop TPDO
SO Start RPDO
OS Stop RPDO
OP Stop RPDO and TPDO
SI Stop TPDO and SDO
OI Stop RPDO, TPDO and SDO
The internal register called “AL Status Code” (Address 0x134:0x135) indicates the eventual error cause of an
unsuccessful transition. This code can be read by using the object called “Extension Board Access“with index
0x2320, sub-index 0. The following table lists the supported AL status error codes:
Code Description Transition Resulting state
0x0000 no error any current state
0x0011 invalid request change I->S, I->O, P->O current state
0x0012 unknown request change current state
0x0013 bootstrap not supported I->B I
0x0016 invalid mailbox configuration I->P I
0x001D invalid output configuration 0, S, P->S S
0x001E invalid input configuration 0, S, P->S P
0x0026 inconsistent settings P->S P
0x0029 free run needs 3-buffer mode P->S P
0x0030 invalid DC SYNCH configuration 0, S S
0x0036 invalid DC SYNC0 cycle time 0, S S
0x8000 mother board watchdog expired I->P I
(OI)
Init
Pre-O
Safe-O
O
erational
(IP)
(PI)
(PS) (SP)
(OP)
(SO) (OS)
(SI)
 Loading...
Loading...

