trapulsPac - User Guide
Chapter 3 – Reference
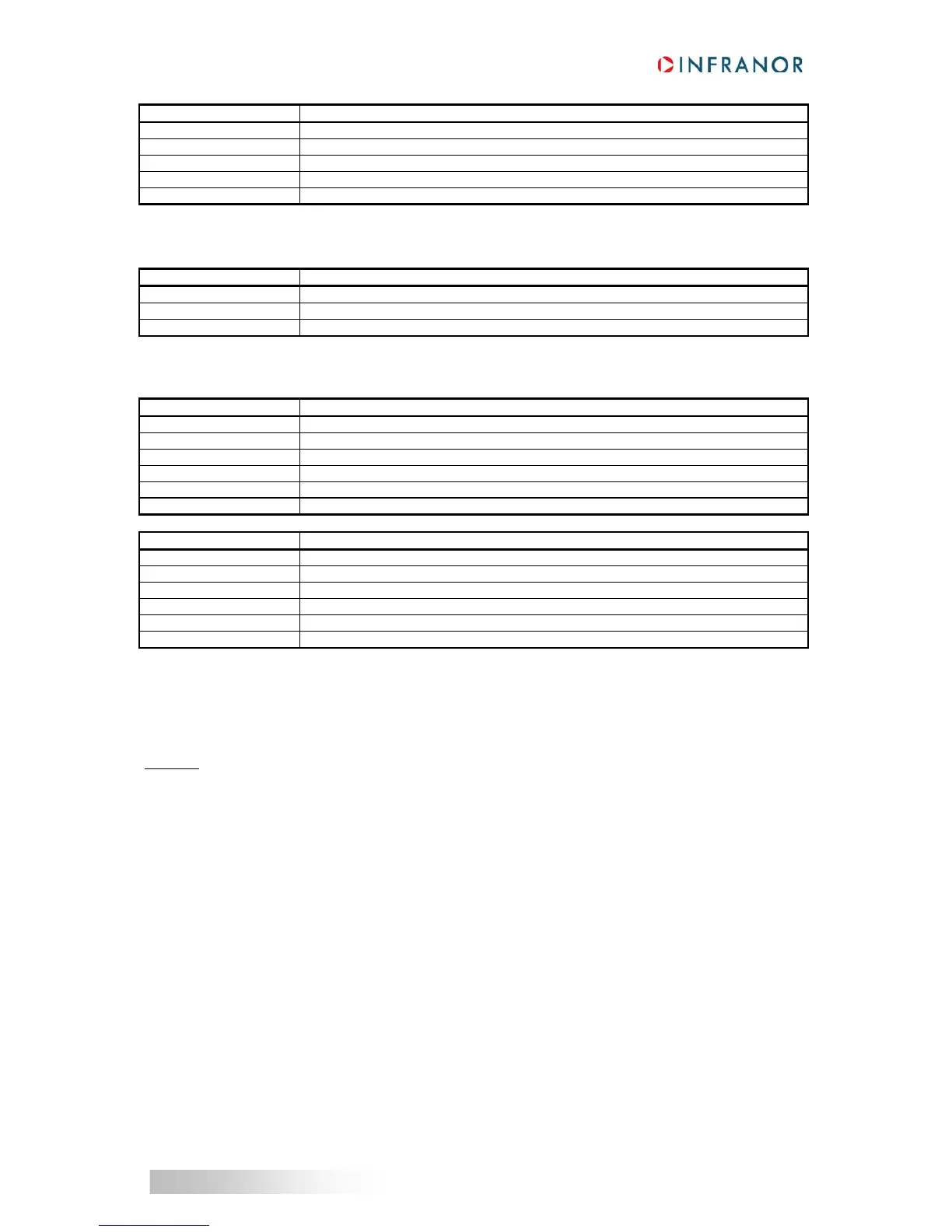
Sub Index 2
Description Motor Revolutions
Data Type Unsigned32
Access ro
PDO Mapping No
Default Value 1
Position Factor
Index 0x6093
Name Position Factor
Object Code ARRAY
Number of Elements 2
Value Description
Sub Index 1
Description Position Factor Numerator
Data Type Unsigned32
Object Class all
Access rw
PDO Mapping No
Default Value 4096
Sub Index 2
Description Position Factor Denominator
Data Type Unsigned32
Object Class all
Access rw
PDO Mapping No
Default Value 4096
The Denominator defines the increments in user unit for one motor revolution.
The Numerator defines the increments in motor unit for one motor revolution. This value must be set at 4096.
Motor_position = Numerator / Denominator * User_position
Example:
1 motor revolution corresponds to a displacement of 5 mm on the load.
The desired user resolution is in µm.
Setting parameters:
Numerator = 4096
Denominator = 5000
User unit = µm
 Loading...
Loading...

