3.2.4.3 - Gearbox Function
The Xtrapuls drive's gearbox function allows synchronizing the slave movement with a master signal in a
relationship defined by a ratio:
Slave_Pos = Numerator/Denominator * Master_Pos + Offset
The gearbox function can be used:
- in a specific operation mode (manufacturer operation mode)
- or as a sequence inside the sequencer mode.
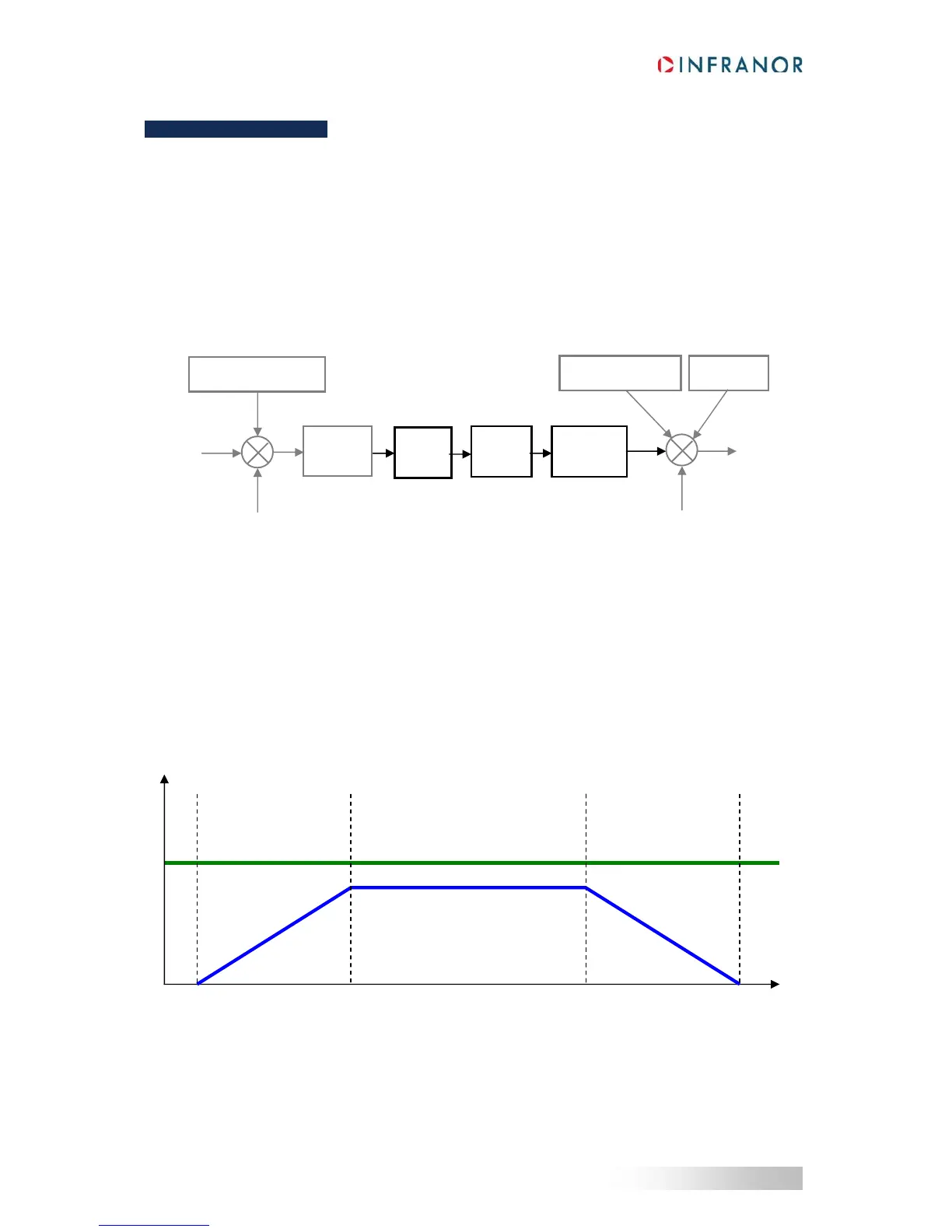
Structure of the Gearbox
When the gearbox function starts, the slave ramps up to the ratio of the master speed according to the gearing
ratio value, and locks in when this is done. An adjustment on the slave's movement allows adjusting the motor
position. When the adjustment is over, the motor position is locked in frequency and phase with the master
position according to the gearing ratio value.
The Gearing ratio is defined by a numerator / denumerator.
During a gearing sequence execution, this value can be multiplied by the sequence gearing ratio factor.
In gearing mode, when the gearbox function is not active, a jog input can be used to manually move the slave.
Coupling Mode
1. Constant acceleration
The slave ramps up to the ratio of the master velocity and locks in when the master's speed is reached. Any lost
distance during synchronization is not caught up.
Slave's speed
Master's speed
Synchronization phase
(engagement)
Synchronized phase Exit
(disengagement)
Gearbox
function
Slave signal
Slave offset signal
Master Signal
Modulo
Master phase shift
Slave phase shift
Master offset signal
Slave Jog
Factor
Ratio
 Loading...
Loading...

