Gearbox function parameters:
Master input
Defines the master input source: encoder input, fieldbus signal.
Ratio select
2 sets of gearing ratios (numerator and denominator) can be pre-defined.
Ratio Select allows selecting the desired ratio set.
Ratio selection and ratio value can be modified on-the-fly.
Ratio factor
A ratio factor (scaling factor) can also be applied for a continuously modified ratio
Accel / decel
Defines acceleration/deceleration values for slave ramp up/down.
Differential speed
Defines the relative speed for adjustment phase.
Master distance
Defines the distance for the master from the start to the synchronization point.
Slave distance
Defines the distance for the slave from the start to the synchronization point.
If the slave distance is 0, then adjustment is not executed.
Synchronization
distance
Defines the distance for the slave that the slave must be synchronized in position. If the
synchronization distance is 0, then the slave will synchronize with the master
indefinitely. An exit command can be used to exit the gearing function.
Trigger Mode
- immediately executed command
- rising edge of a logic input
Start Mode
- relative to initial position
- absolute to master position (modulo)
Exit Mode
- exit gearbox immediately
- slowdown before exit
Coupling Mode
- with constant acceleration
- with constant distance
- with constant acceleration and phase correction
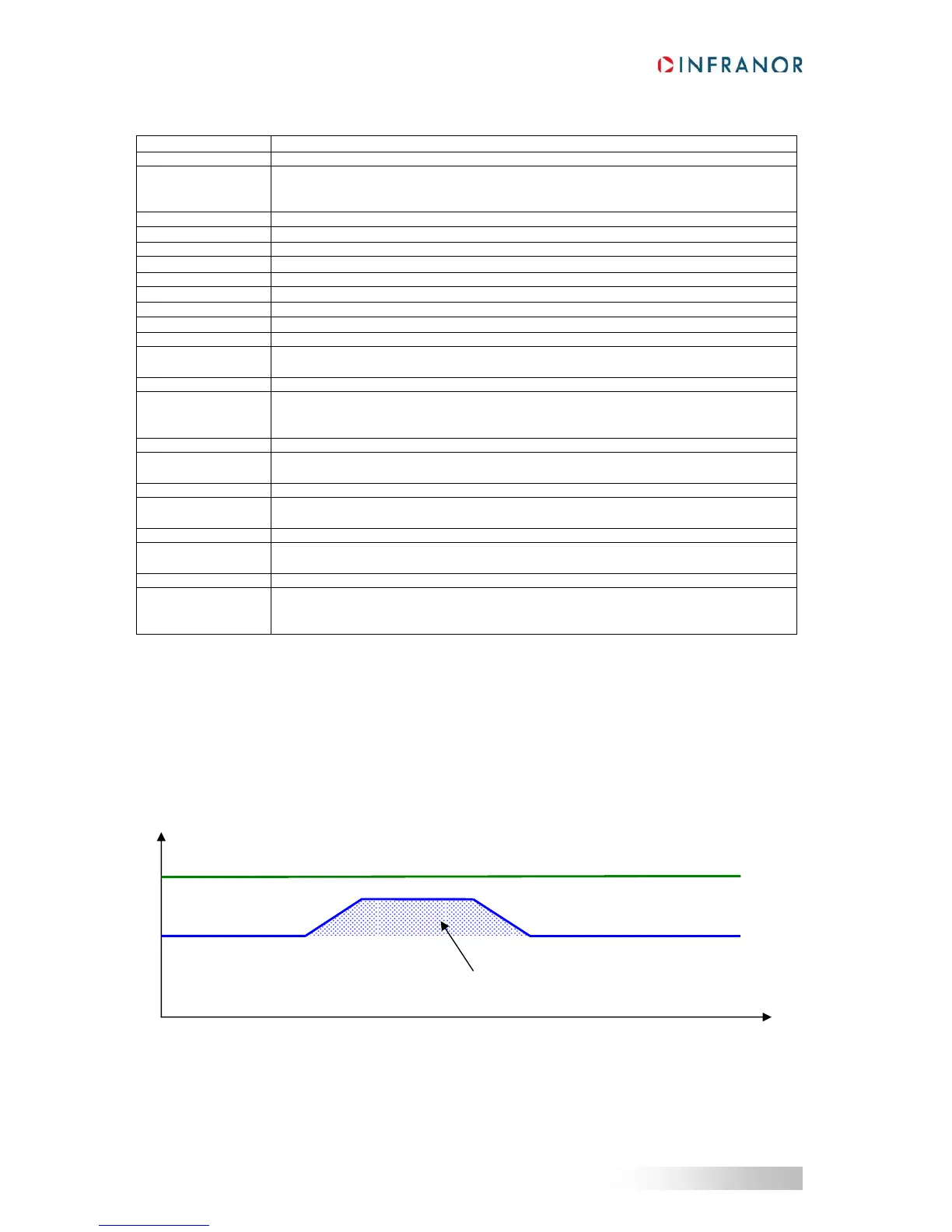
Slave Phase Shift Adjustment
The slave phase shift allows adjusting the slave's phase to the master's phase: a small displacement can be
superimposed on the current slave movement:
- the slave phase shift adjustment can be automatically executed with coupling mode = "constant acceleration
with phase correction",
- or the slave phase shift Adjustment can be manually executed.
- the acceleration and deceleration are defined by 0x6083 and 0x6084, the speed is defined by “differential
speed” (0x392C).
Master
Slave
Slave Phase Shift Distance
 Loading...
Loading...

