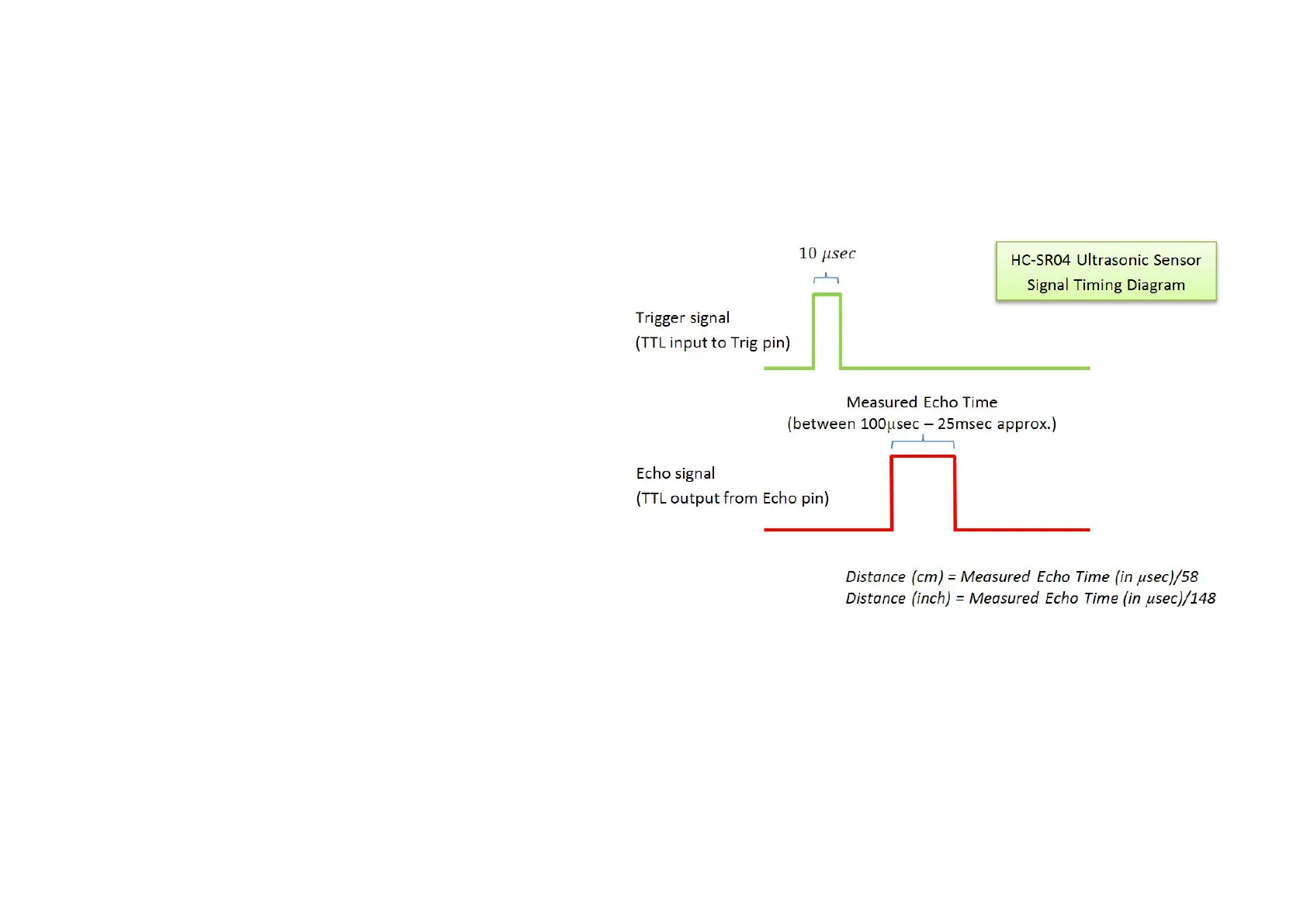
(1) Use IO trigger ranging, at least 10us HIGH level
signal; that is, first pull the Trip Low, then give a
HIGH level signal of 10us.
(2) The module automatically sends eight square
waves of 40khz to automatically detect whether
there is a signal return back;
(3) There is a signal return, through the IO output a
High level, and the duration period of High level is
the time of Ultrasonic wave from emission to return.
 Loading...
Loading...