154
17.4.3.2. Multi-Hand Tool
Selects the Hand Base of the Multi-Hand, set the offset value, set the offset value of each hand to the selected
Hand Base. The Multi-Hand Tool can be connected to the robot with remote Input/Output signals or parallel
Input/Output signals.
When the robot and the controller connected to this software correspond to the function of the 'Multi-Hand', the
item concerning the Multi-Hand are displayed in the parameter menu. The robot and the software version of the
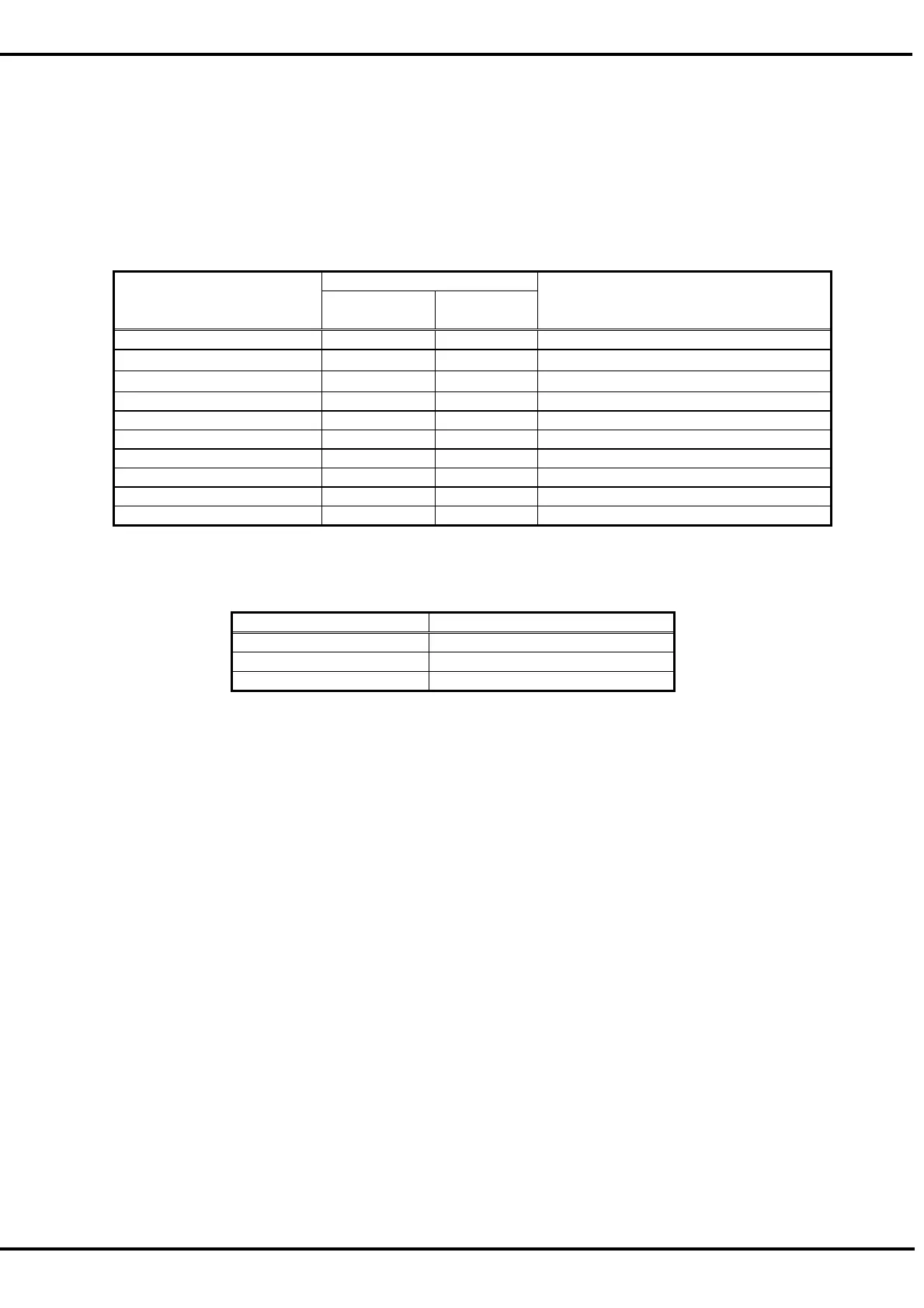
controller which can use the ‘Multi-Hand Tool’ are as follows.
Table 17-1 Robot that can use the ‘Multi-Hand Tool’
Robot
Notes
△
5-axis robot cannot use this parameter.
△
○: By using the standard remote Input/Output,
△: By using the special remote Input/Output
▲: By using the air hand interface
Table 17-2 Robot controller that can use the ‘Multi-Hand Tool’
S/W Ver. of the controller
Can be used with all versions

 Loading...
Loading...



