2-7Operation flow
2Preparation for Using Extended Function
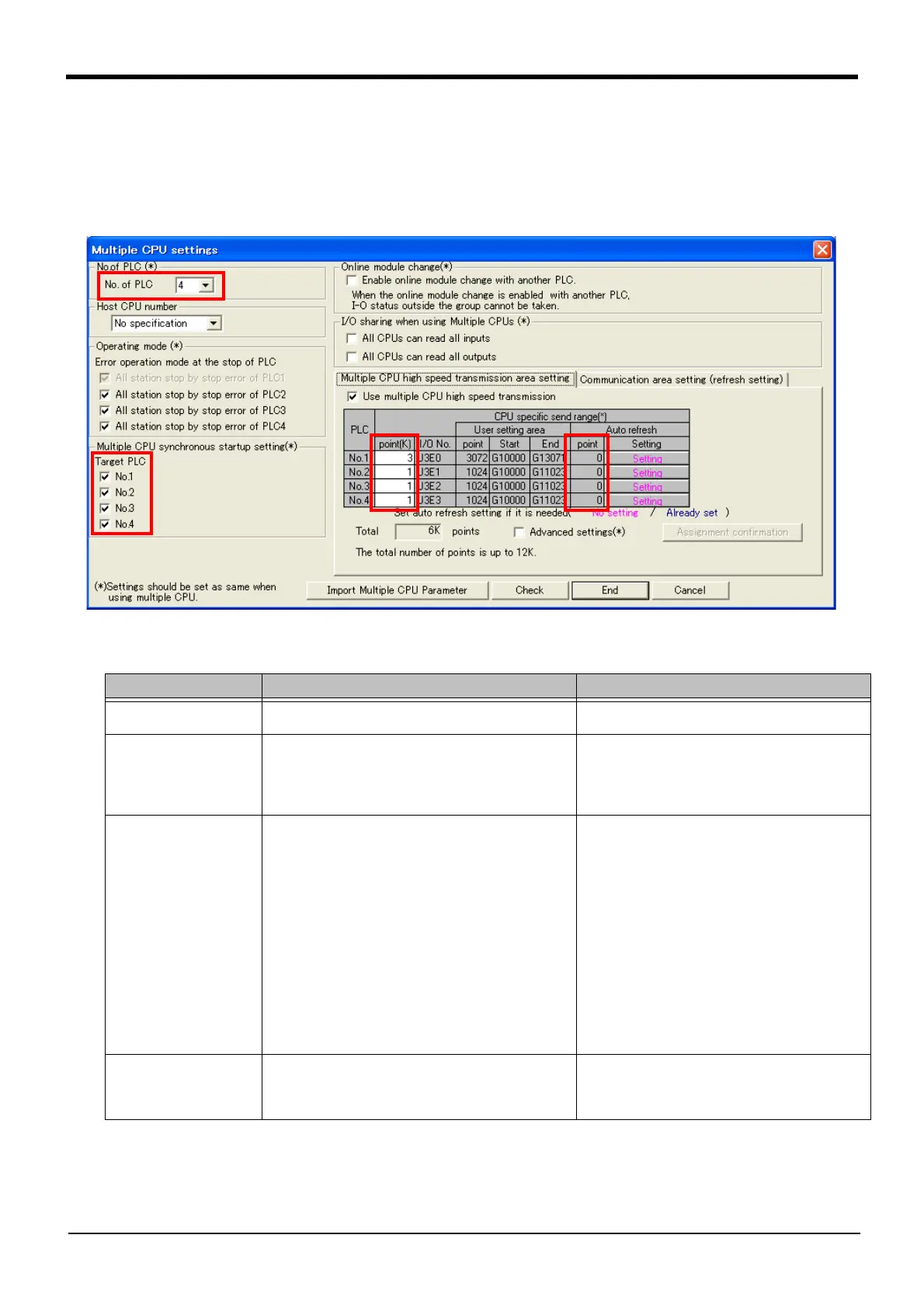
2.1.1 Set up Sequencer's Multiple CPUs
Here, sets up the multiple CPU setting as a sequencer's PC parameter. Also refer to the description of
sequencer link I/O functions described in Supplement volume "Instruction Manual, Detailed Description of
Functions and Operations."
GX-Developer multiple CPU setting screen (three robots. The shared memory extended functions are valid
in all robots)
Setting Item Description Setting Value
CPU quantity Set up the quantity of CPU units used in multiple CPU
system.
2 - 4
Synchronous startup
among multiple CPUs
Set up this to synchronize the startup times of CPU
units in multiple CPU system.
* Because the robot CPU takes a dozen second for
startup, select the synchronize startup
Required for check
High-speed communica-
tion area setting among
multiple CPUs
Set up this when the data is transferred by using the
high-speed communication area
Note1)
among multiple
CPUs.
The necessary area for robot is as follows:
Shared memory extended functions are valid:
Robot input area: 1.0K
Robot output area: 1.0K
Shared memory extended functions are invalid:
Robot input area: 0.5K
Robot output area: 0.5K
Note1) For information about multiple CPUs and high-speed communication area among multiple CPUs, refer to the QCPU
manual (QCPU User Manual, Multiple CPU System).
<Shared memory extended functions are valid:>
Device #1: Sum of the size (1K) of the data to be
sent to the robot and the size of the data to be
sent to other devices
Robot device: Set 1K for it
Other devices: Set its own transmission size
<Shared memory extended functions are invalid:>
Device #1: Sum of the size (0.5K) of the data to be
sent to the robot and the size of the data to be
sent to other devices
Robot device: Set 1K for it
Note2)
Other devices: Set its own transmission size
Note 2: Because the area is set up in 1K unit, allo-
cate 1K even in case of 0.5K.
Note2) Because the area is set up in 1K unit, allocate 1K even in case of 0.5K.
Automatic refresh setting Set up this when the device data is automatically
refreshed by using the high-speed communication area
among multiple CPUs.
* Robot CPU is not supported. Always set this to zero.
Robot device: Set zero point for it
Other devices: To use automatic refresh function,
set its score and target device

 Loading...
Loading...






