Pg 4
v2.2 v4r6c
Any questions please READ my WIKI - Read the PARIS forum thread/post on RCG
then if you are still stuck - contact me - email is best - I will ask you for your GUI screen capture and details of your copter -
photos of your setup info@multiWiicopter.com Quinton Marais (RCG AlouetteIII)
33 Doubleview Drive, Elanora, Qld 4221 AUSTRALIA,
Office hours are 9am-5pm Mon-Friday AU EST time TEL +61 7 5598 3999 Cell +61 418 983 999
Your board is running v 2.2 - Use GUI JAVAConfig 2.2
http://www.multiwiicopter.com/pages/multiwiicopter-wiki
this is an abbreviated guide - FULL PARIS info online
TRI.Copter Arming - as TriCopters are tted with a YAW tilt servo they
have a special (alternate) arming procedure in >1.7 MultiWii software. Learn
to recognise that your Wii TriCopter is ARMED. SET THRO to Zero - off -
Hold Cyclic-right for 1 sec - you will see the Green LED come on - stays
on If LED does not come on GREEN - then increase ELEV/AILER travel
(see Transmitter Calibration procedure - above top) - Check the THRO is
not actually reversed by mistake - and trim down a few clicks on the THRO
trim If it still won’t arm connect FTDI and use the JAVA-Cong (see below)
to make sure the Throttle PWM is below 1100 (normal THRO range is 1100-
1900) - In order to arm - the Wii CPU is looking for THRO <1100 and AIL/
ELEV ~1900 - The GUI shows actual values from Rx and is a valuable guide
to trouble-shoot a CPU which won’t arm. TRI.Copter Disarming - Learn to
DISARM the ESC’s before touching or approaching the TriCopter ESC’s/Mo-
tors can start suddenly and the props can cut - ngers and eyes - permanent
injuries With THRO OFF ; Hold the cyclic stick LEFT for 1 sec ; then the CPU
GREEN LED will go OUT and stay out
LED’s Light emitting diodes
Question - What is the meaning of the LEDS’on a PARIS board?
Answers - different things at different times - The GUI Cong
on your PC/Mac is far more useful but when your Copter is not
connected to the PARIS board the led can provide some limited
information - see below -
RED LED = power to 328 CPU is ON - should always be on
The CPU board gets power from the 5v BUS ; or USB .
GREEN smd led /UltraBright White LED = :-
1) GREEN LEDS are on and stay on when the board is armed -
are OFF and stay OFF when the board is DISARMED
2) GREEN LEDS blink rapidly 5 times Cal.Sticks.Gyro of the
Gyro(MP+) then goes off - wait 10 secs
3) GREEN LEDS blink medium whilst computing a Cal.Sticks.Acc
of the Acc(NK) then goes off - wait 10 secs
4) GREEN LEDS blinks during initial power up then goes OFF (the
very FIRST time it will not because it’s never been calibrated :)
(see Cal.1 Cal.2 and Cal.3 procedure - below)
5) GREEN LEDS blink slowly if a problem is detected on start-up -
code error (usually calibration NOT done)
6) GREEN LEDS blink slowly if Calibration Cal.1 Cal.2 and Cal.3
not completed (see below)
7) blinks once to indicate the CPU compute’s a leveling correction
8) GREEN LEDS blinks rapidly 5 times for each stick-banging
throw in ACC trimming “learning” mode
9) GREEN LEDS blinks slowly after loading Software in Arduino22
and before doing the Cal.GUI.Acc (see below)
10) GREEN LEDS blinks very rapidy for 30 secs when doing MAG
calibration - stops by itself when nished
11) GREEN LEDS comes one when disarmed if it detects the
PARIS board is tilted >20° or so - goes off again if the board is
leveled out
Question : My GREEN LED Flashes slowly
and my PARIS just won’t arm?
Answer : The most common reason for not being able to arm
is - YOU skipped the Calibration of your Tx (above -top Pg1)
- see Transmitter Calibration - PARIS is waiting for Safe arm
condition - Tx is sending out the wrong numbers
Question : My Copter wont hover level in AUTO
LEVEL - goes off to the side
re-Calibrate - THIS IS ALREADY DONE at the factory - cali-
bration is effected by temperature and Transmitter Mid-Points
not on 1500 - Always load your multicopter with a Cof G in
centre - this means you will need hardly any Trimming in Acro
mode - then trim using the ACC trimming Pg 3 - then if still
needed re-calibrate - with the ACC itself perfectly level & the
airframe LEVEL as well - use a bubble level, no vibration or
movement - then do Calbration. Balance all Props!
Question : My Quad is not flying well on default
PIDs - what are the secret PIDs the Pro’s use to
make it fly perfectly
Answer - this is a common myth - Real answers is - the Default
PIDs are very close to perfect if you have your copter setup well
- by setup I am referring to the airframe(must be super rigid/
stiff - zero exing Carbon is best see SCARAB - PARIS must be
rmly bolted to the airframe) the weight (light) the props
(balanced dynamically and statically - nothing is as important as
balanced props - when you hold the Quad and go to full throttle
above your head - it MUST be silky smooth!) the ESCs (use the
recommended ESCs of the correct size - big ESC dont belong on
multicopters) the motors (small lightweight motors correctly
matched to their prop size - see the gear list and motor pages
for matching props/motors , and lastly the pilot (y smoothly -
dont jerk the controls backwards and forwards rapidly - smooth
delibrate moves)
5.0v only
correct polarity only!
led strip GND
LV GPS
or LCD
HV GPS
Bluetooth
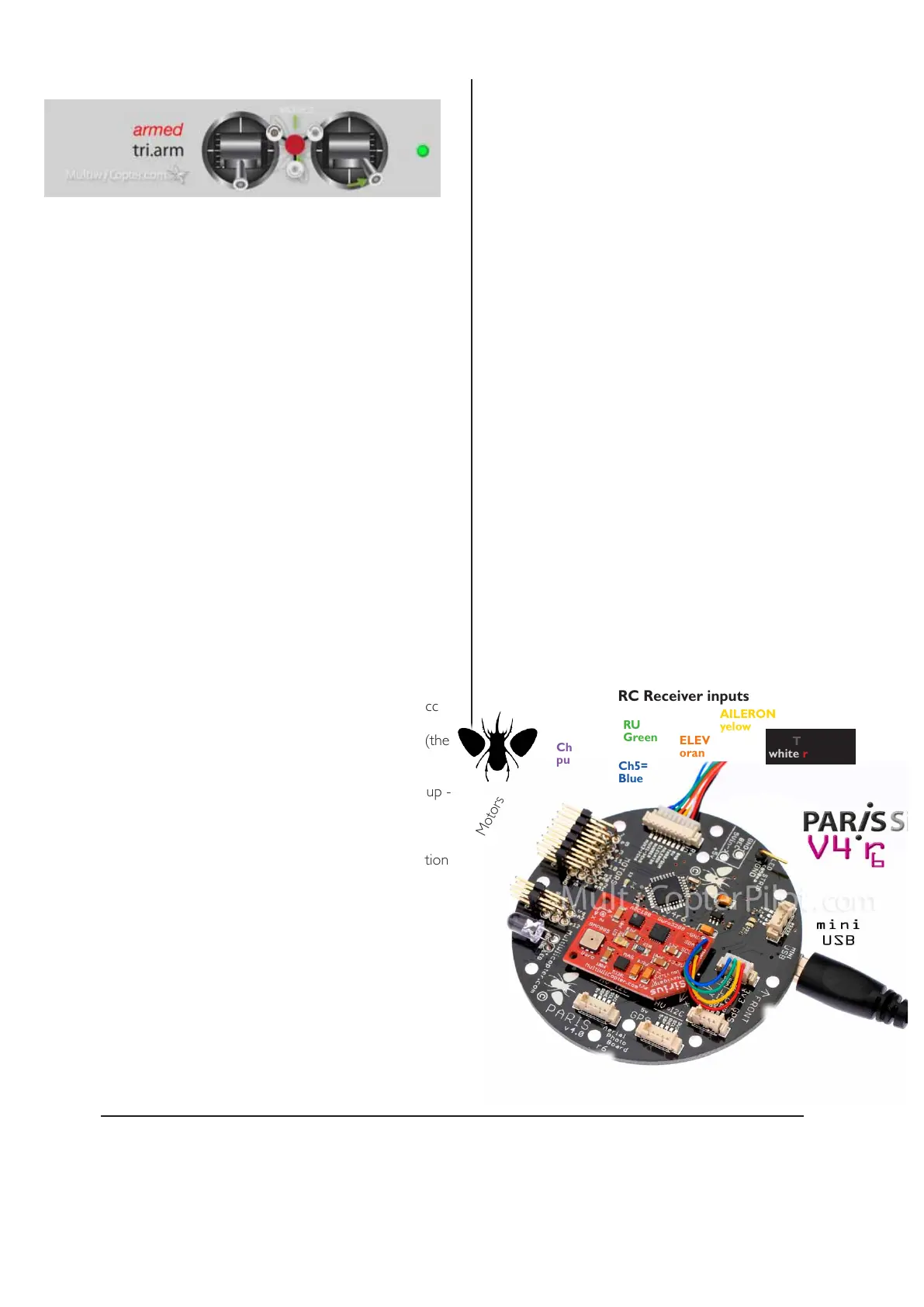
RC Receiver inputs
Motors
THRO
white/red/black
AILERON
yelow
ELEVATOR
orange
RUDDER
Green
Ch5=Aux1
Blue
Ch6=Aux2
purple
}
6.5.10.11.9.3
pitch
roll
 Loading...
Loading...