6. Operation
— 6-1 —
6. Operation
6.1. Preparation
6.1.1. Wiring Check
Caution : On completion of wiring the Driver Unit Model EDD, check the items listed
in Table 6-1: Before operating the Megatorque Motor System.
Table 6-1: Before operating the Megatorque Motor System
Connection of main power
and Input/Output signal
cables
Check if the wiring is properly done.
Check if the screws of the ground terminals are securely fastened.
Check if the connectors are properly connected and secured.
Check if the Cable Set (Motor cable and resolver cable) are properly
connected and locked to the connectors.
Check if the Handy Terminal is connected properly, and locked to the CN2
connector.
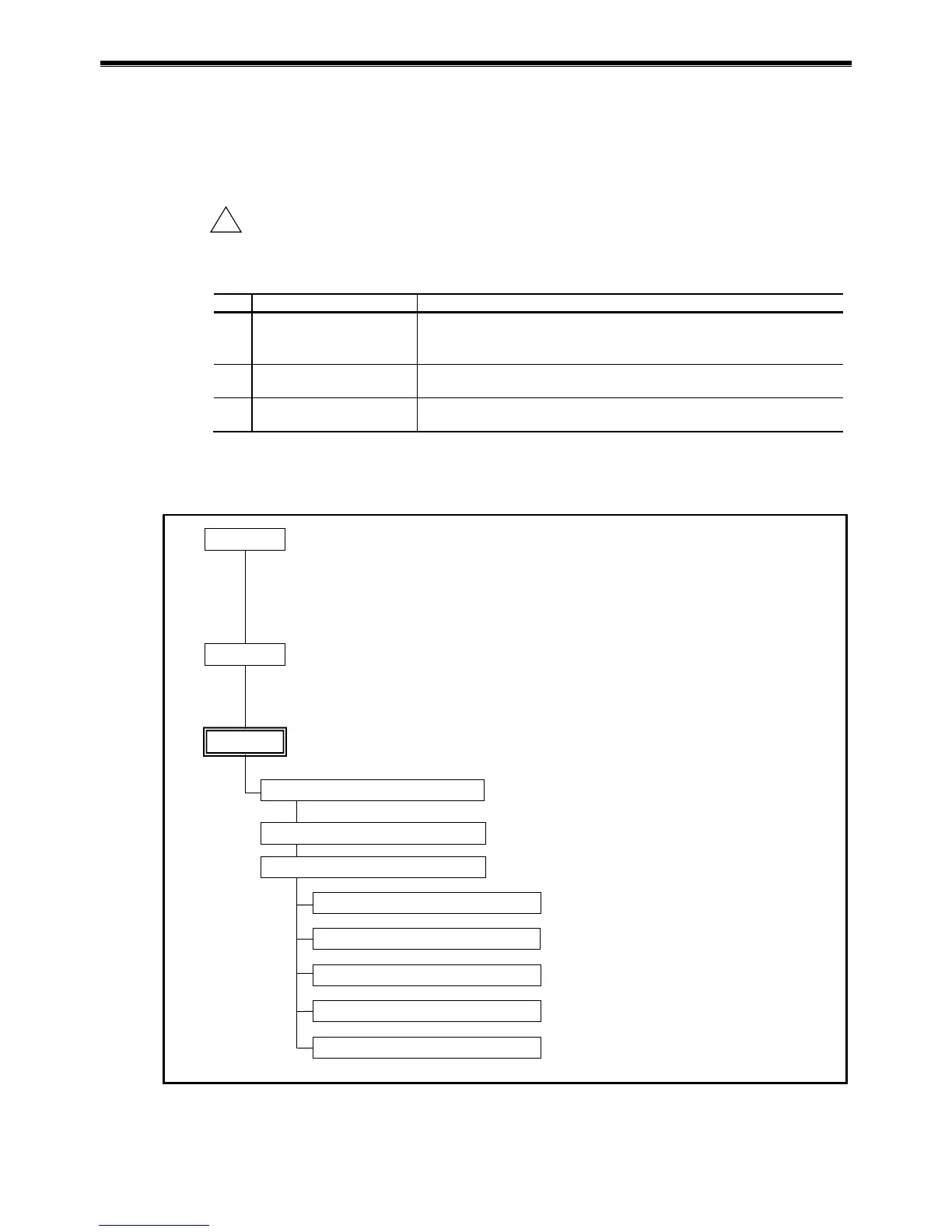
6.1.2. Operation Procedure
Fig 6-1: Operation Procedure
Check for the power voltage (main power and control power).
Turn on the power, then confirm that the power LED (green) and the 7 segments LED on the
front panel of the Driver Unit are indicating normal state.
Confirm that the display of the Handy Terminal shows the screen for initial setting.
Refer to “5. Tuning.”
Tune the servo parameters. Skip this part if all tuning have been completed in advance.
RS-232C command positioning
6.3.3. Pulse Train Command Positioning
Operation
6.3.2. Program Positionng Operation
6.3.5. RS-232C Communication
Positioning Operation
6.2.3. Setting Home Position
Positioning by pulse train
command positioning
6.2.2. Direction of Position Scale
6.2.4. Software Over Travel Limit
Set the direction of position scale.
Set the software travel limits.
6.3.6. Velocity and Torque Control by
Analog Input

 Loading...
Loading...
