7. Operational Function
— 7-11 —
7.2.3. Over Travel Limit Direction: OTPA and OTMA
This output reports the entering direction of the Motor to the off-limits area specified by the hardware over
travel limits and the software over travel limits.
This output can be used to determine the direction to get out from the off-limits area.
Table 7-15: Signal logic of the OTPA (shipping set) Table 7-16: Signal logic of the OTMA (shipping set)
Entered from the plus direction
Entered from the minus direction.
The outputs of OTPA and OTMA are the negative logic. However, the logic can be changed to the
positive logic. Refer to “8.1.3.2. Editing Control Output Function” for the way to change the logic.
The System gets in the conditions shown in the table below when the output is activated.
Table 7-17: Indication of 7 segments LED when the output is activated.
Command TA (Tell alarm status)
The direction, plus or minus, of the limit detected by the output OTPA or OTMA depends on the setting of
the parameter DI (Direction inversion) and the activated limit OTPA or OPMA as described in the table
below.
Table 7-18: Limit direction and outputs OTPA and OTMA
Activated limit (entering side)
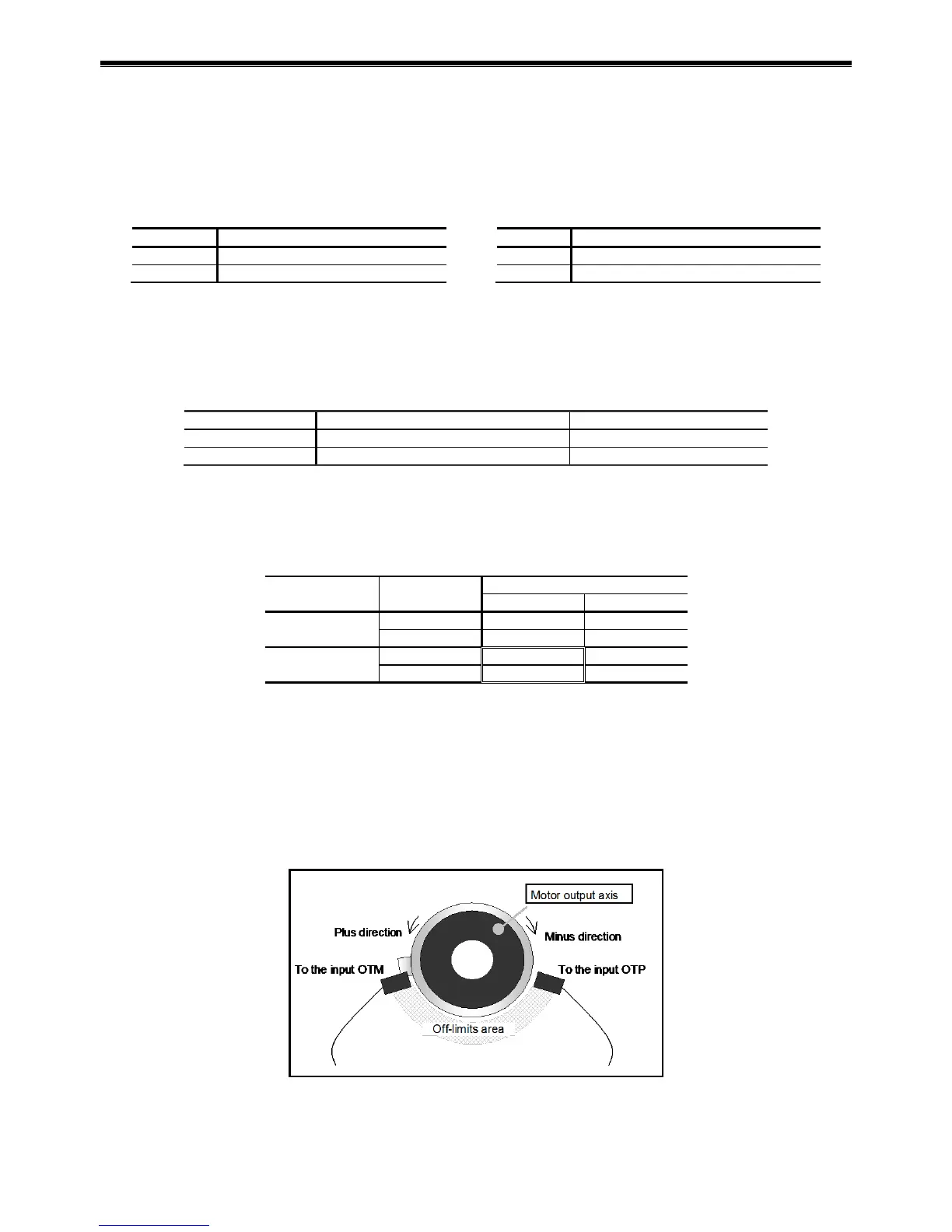
In particular, when the parameter DI is set to DI1, the relation between the hardware over travel and the detected
limit is unique. The unique relation between the counting direction of the position scale and the travel limit
switch is shown in the figure below.
When the parameter DI is set to DI1, the Motor rotating in the plus direction enters the off-
limits area from the limit sensor OTM.
(This is because the plus direction of the Motor position scale is CCW.)
In this case, the output OTPA opens as the Motor enters in the off-limits area from the plus side.
Fig 7-9: Over travel limit detraction when the parameter DI is set to DI1

 Loading...
Loading...
