200
High-speed Counter Board Section 8-1
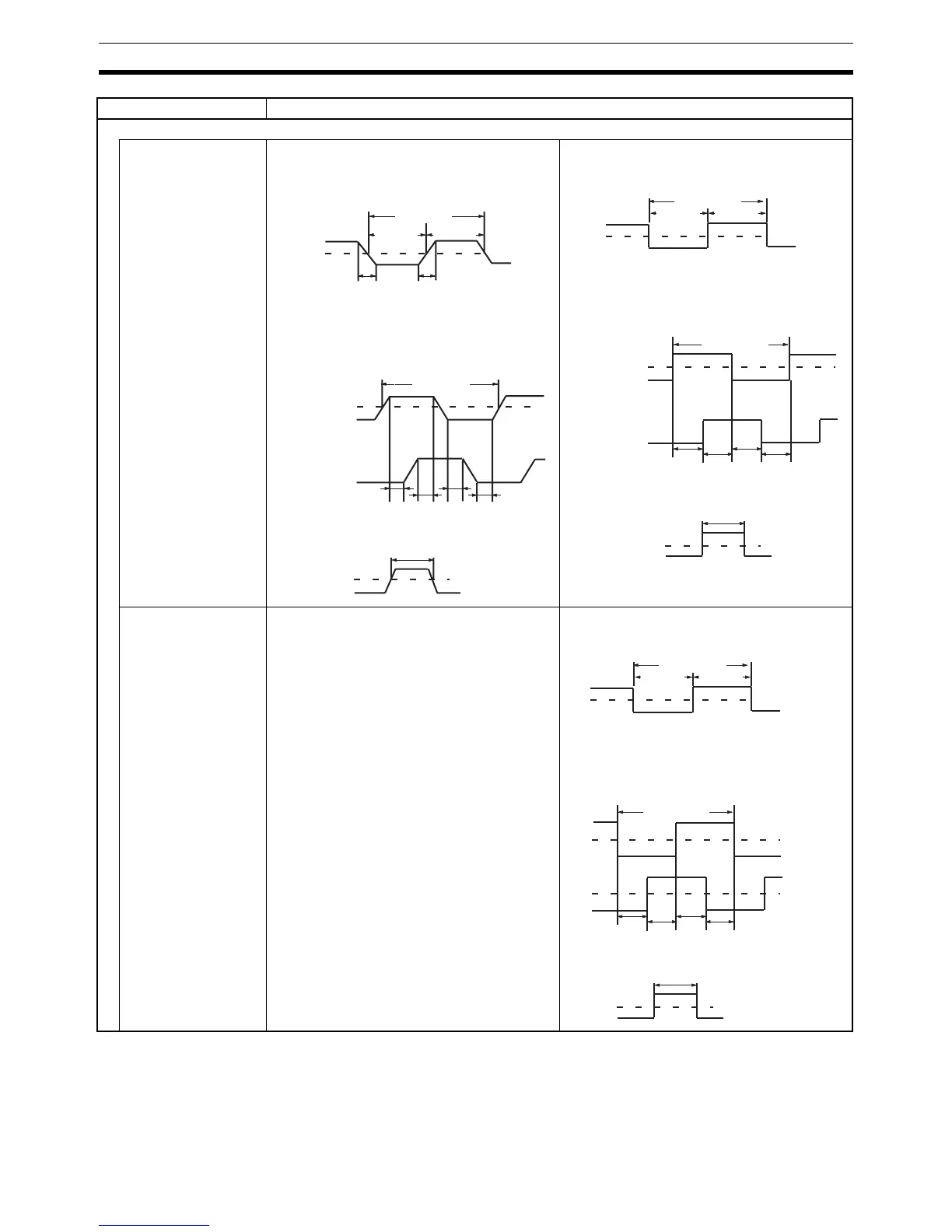
Min. response pulse
50 kHz setting
500 kHz setting The counting operation at 500 kHz is not
reliable.
Item Specifications
90 µs min.
ON
50%
OFF
Encoder inputs A and B
Waveform of encoder inputs A and B
Input rise/fall time: 3 µs max.
50 kHz, pulse with duty factor of 50%
10 µs min.
10 µs min.
3 µs max. 3 µs max.
ON
50%
OFF
20 µs min.
Relationship between phases A and B when
phase differential input is used.
T1, T2, T3, T4: 4.5 µs min.
At least 4.5 µs must be provided to allow
Phase A ↔ Phase B change.
Phase A
Waveform of encoder input Z/Sensor input
Pulse width must be 90 µs min.
Phase B
ON
50%
OFF
ON
OFF
20 µs min.
T1
T2
T3
T4
ON
90 µs min.
50%
OFF
Encoder inputs A and B
Waveform of + terminal
50 kHz, pulse with duty factor of 50%
Phase A
Waveform of encoder input Z/Sensor input
Pulse width must be 90 µs min.
10 ms min.
10 ms min.
ON
50%
OFF
20 µs min.
Relationship between phases A and B when
phase differential input is used.
T1, T2, T3, T4: 4.5 µs min.
At least 4.5 µs must be provided to allow
Phase A ↔ Phase B change.
Phase B
ON
50%
OFF
20 µs min.
ON
OFF
T1
T2
T3
T4
Encoder inputs A and B
Waveform of + terminal
500 kHz, pulse with duty factor of 50%
Relationship between phases A and B when
phase differential input is used.
T1, T2, T3, T4: 1.0 µs min.
At least 1.0 ms must be provided to allow
Phase A ↔ Phase B change.
Waveform of encoder input Z/Sensor input
Pulse width must be 90 µs min.
ON
90 µs min.
50%
OFF
ON
50%
OFF
ON
OFF
T1
T2
T3
T4
4 µs min.
1 µs min. 1 µs min.
ON
50%
OFF
2 µs min.

 Loading...
Loading...






