Categories Section 4-1
77
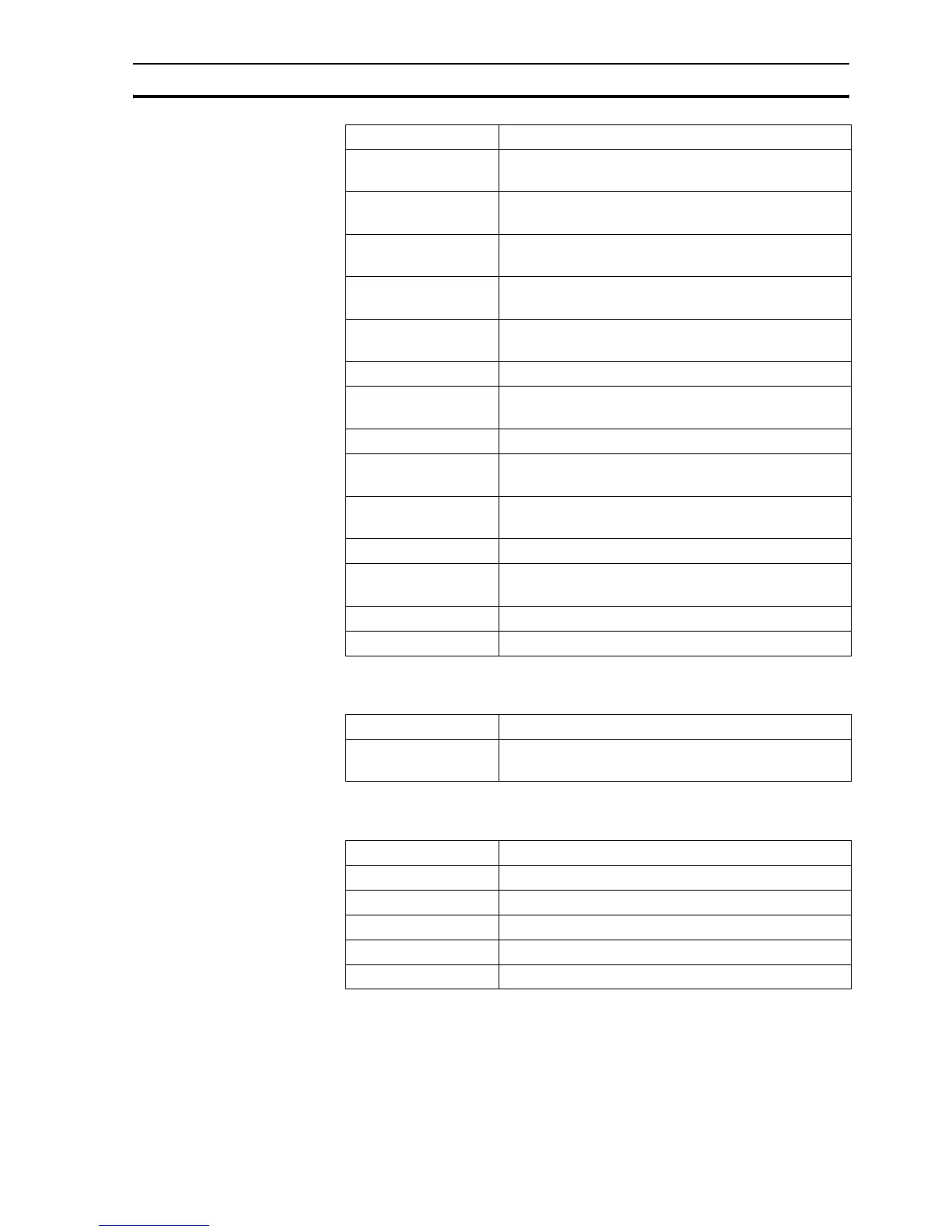
4-1-3 Communication commands and parameters
/i
4-1-4 Constants
/i
REV_JOG Contains the input number to be used as a jog reverse
input.
RS_LIMIT Contains the absolute position of the reverse software
limit.
S_REF Contains the speed reference value which is applied when
the axis is in open loop.
S_REF_OUT Contains the speed reference value being applied to the
Servo Driver for both open as closed loop.
SERVO Determines whether the axis runs under servo control or
open loop.
SPEED Contains the demand speed in units/s.
SPEED_SIGN Configures the voltage range of the analogue speed refer-
ence output of the Encoder Interface.
SRAMP Contains the S-curve factor.
T_REF Contains the torque reference value which is applied to the
servo motor.
TRANS_DPOS Contains axis demand position at output of frame transfor-
mation.
UNITS Contains the unit conversion factor.
VERIFY Selects different modes of operation on a stepper output
axis.
VFF_GAIN Contains the speed feed forward control gain.
VP_SPEED Contains the speed profile speed.
Name Description
Name Description
FINS_COMMS Sends FINS Read Memory and Write Memory to a desig-
nated FINS server unit.
Name Description
FALSE Equal to the numerical value 0.
OFF Equal to the numerical value 0.
ON Equal to the numerical value 1.
PI Equal to the numerical value 3.1416.
TRUE Equal to the numerical value -1.
 Loading...
Loading...









