Do you have a question about the OTTO MOTORS Lifter MkIV and is the answer not in the manual?
General, Robot, and Charger hazard notices with DANGER, WARNING, and CAUTION levels.
Explanation of various hazard labels used on OTTO Motors products for safe operation.
Covers personnel awareness, facility conditions, environment, payload, battery, and operational safety.
Information subject to change, OTTO Motors' responsibility and user's liability.
Lists the items included with the OTTO Lifter robot package.
Details the physical dimensions and mass of the OTTO Lifter robot.
Outlines the robot's speed capabilities, turning, and docking parameters.
Describes battery specifications, charging options, capacity, and dimensions.
Details the sensors and computer hardware used in the robot's control system.
Covers manual control interfaces and connections for accessories.
Specifies supported pallets, operating conditions, and altitude limits.
Information on intelligent braking, adaptive field sets, and compliance standards.
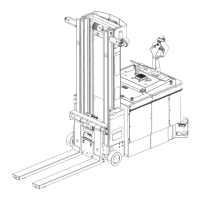
Identifies and labels various physical components of the OTTO Lifter.
Explains how to start up and shut down the robot using the power button.
Describes the function and location of the robot's emergency stop buttons.
Details the purpose of the safety reset button for clearing states.
Explains how the auto button toggles between autonomous and manual modes.
Information on the digital interface for viewing jobs and tasks.
Describes the tiller's use for manual control of the robot's movement and forks.
Explains the indicator that displays the robot's current battery charge state.
Describes the light pipe and other visual signals indicating robot status and motion.
Details the light states of the safety reset button for system status.
Information about the speakers for audible indications and warnings.
Explains the dome light's function in indicating the robot's state.
Describes the function of direction lights indicating travel direction.
Identifies the lift points used for robot transport.
Describes the top door's access to internal components and battery release.
Explains the left side door's access to the battery compartment.
Details the LiDAR scanners used for obstacle detection and collision prevention.
Explains the role of 3D cameras in navigation and obstacle avoidance.
Describes sensors on forks detecting force for collision detection.
Details sensors assisting with payload alignment and security.
Explains encoders for measuring wheel position and speed.
Procedure for disconnecting power for maintenance and safety.
Steps for performing pre-checks and starting the robot.
Procedures for safely powering down the robot.
Step-by-step guide for safely replacing the robot's battery.
Instructions for charging the robot's battery manually.
Guidelines for storing the robot and its battery for extended periods.
Steps for connecting the robot to a computer via Ethernet.
Instructions for configuring network settings for robot connectivity.
Process for integrating a robot into the OTTO Fleet Manager.
How the robot operates autonomously, including enabling and dispatching jobs.
Guide to operating the robot in manual mode using the tiller.
How to access and manage robot exceptions in Fleet Manager and OTTO App.
A schedule outlining daily, monthly, and annual checks for robot components.
Procedure for performing a brief daily inspection of the robot.
Tasks to perform monthly, including guarding inspection.
Tasks to perform every three months, including lubrication.
Tasks to perform every six months, including brake inspection.
Tasks to perform annually, including hydraulic fluid inspection.
FCC compliance information and regulatory declarations for the product.
Canadian regulatory compliance information for the device.
Checklist for ensuring robot safety and operational readiness before use.
| Brand | OTTO MOTORS |
|---|---|
| Model | Lifter MkIV |
| Category | Forklifts |
| Language | English |