Page 16 · SumoBot – Mini Sumo Robotics
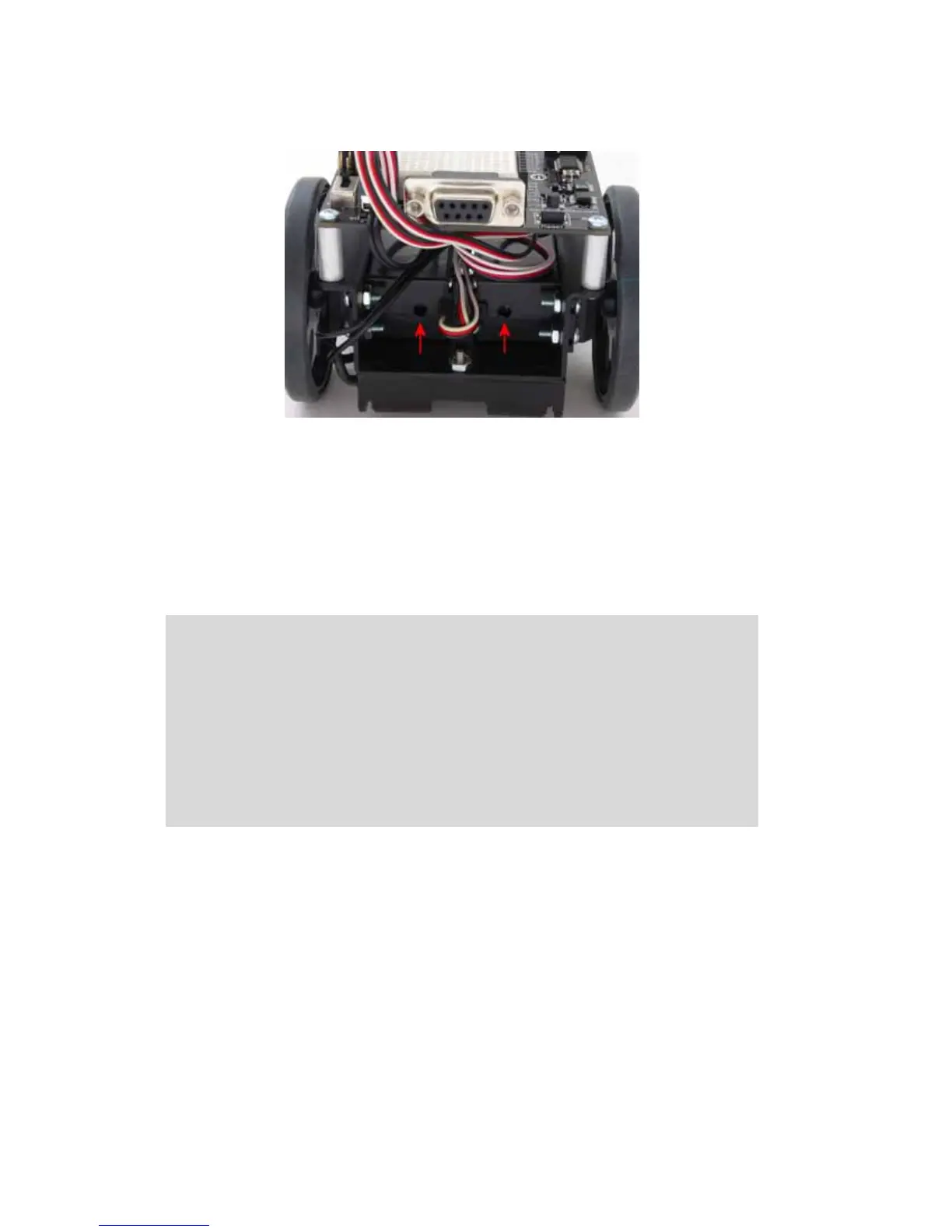
Figure 2.5: SumoBot Servo Adjustment Ports
Don't worry, for the moment, how the program works; that will become clear in the next
section.
SUMOBOT MOTION TEST
With the motors aligned, it is time to test the SumoBot for essential motion control. Load
the following program into the BASIC Stamp Editor, and then download it to the
SumoBot:
' SumoBot_2.2_Motor_Test.BS2
' {$STAMP BS2}
' {$PBASIC 2.5}
' -----[ I/O Definitions ]-------------------------------------------------
LMotor PIN 13 ' left servo motor
RMotor PIN 12 ' right servo motor
' -----[ Constants ]-------------------------------------------------------
LFwdFast CON 1000 ' left motor fwd; fast
LFwdSlow CON 800 ' left motor fwd; slow
LStop CON 750 ' left motor stop
LRevSlow CON 700 ' left motor rev; slow

 Loading...
Loading...