12
PT
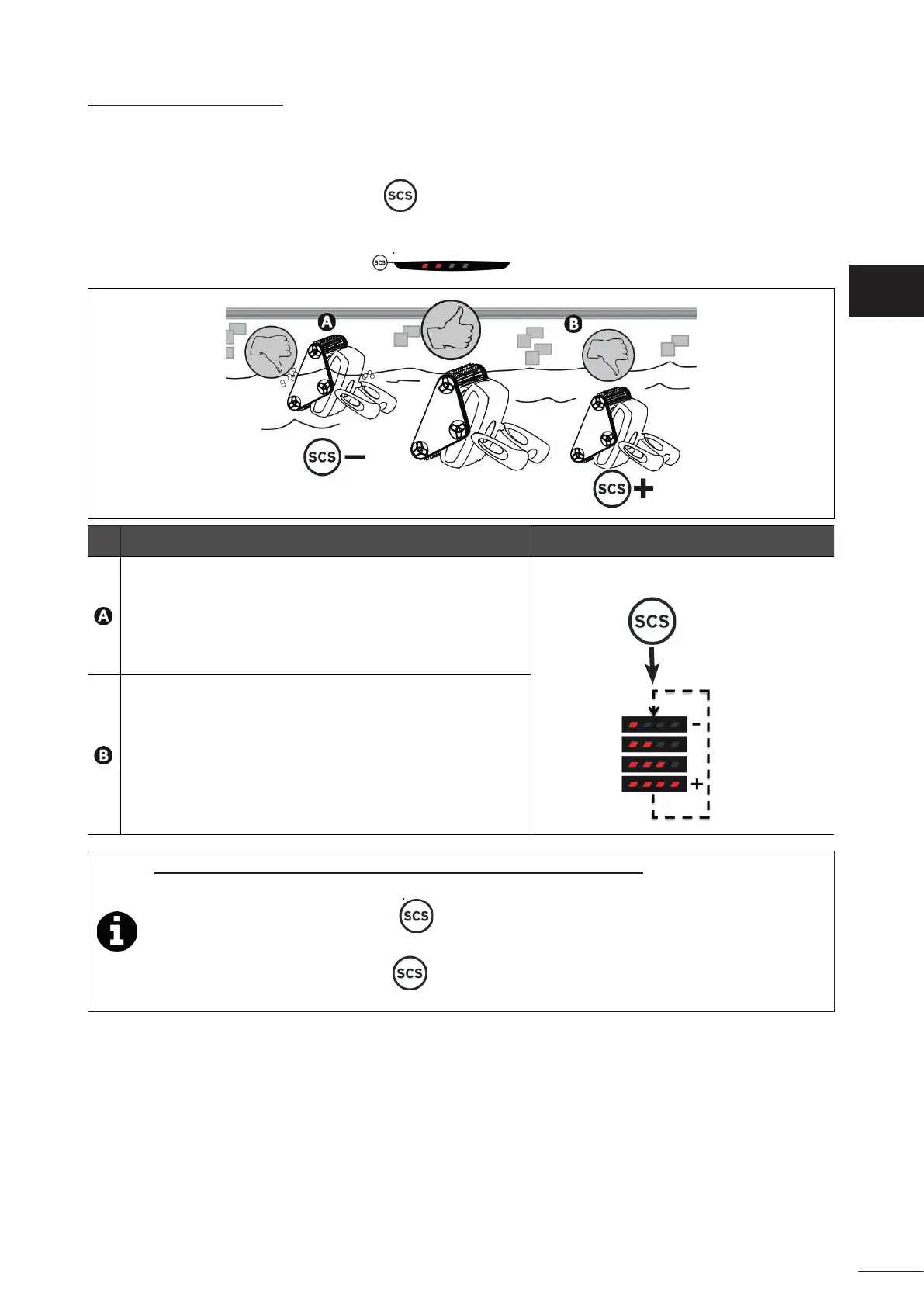
2.5.4 Controlo da super cie
• Cer que-se de que o ltro do robot está limpo para não alterar o comportamento do robot.
• Uma vez lançado o ciclo de limpeza, observe o comportamento do robot quando este subir nas paredes e quando
escovar a linha de água.
• A qualquer momento, pode u lizar o botão (Surface Control System) segundo o comportamento do robot: ver
o quadro seguinte.
• A nova parametrização será da em conta na próxima subida nas paredes.
• Por prede nição, os 2 Leds estão acesos
A nova parametrização será da em conta na próxima subida nas paredes.
.
Comportamento do robot a observar Ação
O robot sobe rapidamente pela parede e ultrapassa a
linha de água até aspirar ar: Reduzir o número de Leds.
Premir:
O robot sobe lentamente pelas paredes e para antes da
linha de água: Aumentar o número de Leds.
Conselho: O mizar a limpeza das paredes e o escovamento da linha de água
Consoante o tipo de revestimento da piscina, o robot comporta-se de maneira diferente ao subir pelas
paredes. O robot dispõe da função
Consoante o tipo de revestimento da piscina, o robot comporta-se de maneira diferente ao subir pelas
que permite otimizar a limpeza das paredes, e depois o
escovamento da linha de água em todos os tipos de revestimentos.
Qualquer que seja o ajuste da função , a potência de aspiração permanece sempre máxima quando o
robot se desloca no fundo da piscina.
 Loading...
Loading...
