2.4 Gumstix DuoVero Embedded Computer
The Gumstix DuoVero is a small-scale embedded computer that runs the QUARC
r
runtime. With QUARC
r
installed, code generated from Matlab
r
Simulink
r
is cross-compiled, downloaded, and executed directly on the
DuoVero. The DuoVero is connected directly to the QBot 2 DAQ on the bottom side of the PCB. The DuoVero
also comes with integrated 802.11 b/g/n WiFi to allow wireless connection between the target Gumstix and the host
computer and/or other vehicles.
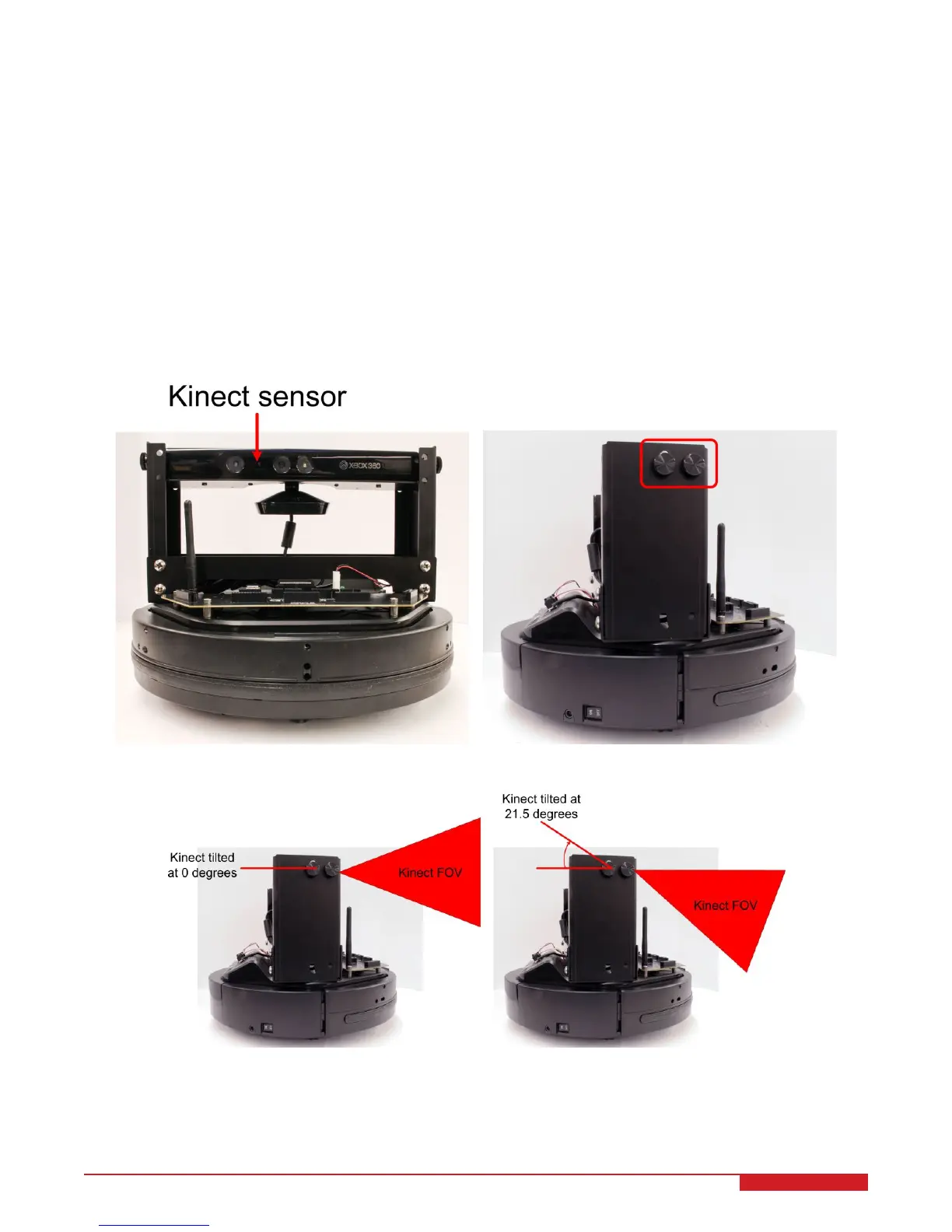
2.5 The Kinect Sensor
The Microsoft Kinect sensor is an integrated RGB camera and depth sensor used in a variety of experiments (Figure
2.13a). The Kinect camera provides RGB image capture and 11-bit depth sensing at a resolution of 640 × 480. The
Kinect's depth sensor utilizes infrared light and has a range of 0.5 m to 6 m. Due to the type of infrared sensor, the
QBot 2 Kinect should only be used indoors in locations without direct sunlight for best results.
(a) The QBot 2 with Kinect sensor (b) The QBot 2 Kinect thumb screws
(c) The QBot 2 Kinect tilted at 0 degrees and 21.5 degrees
Figure 2.13: The QBot 2 Kinext sensor
QBOT 2 - User Manual 12
 Loading...
Loading...