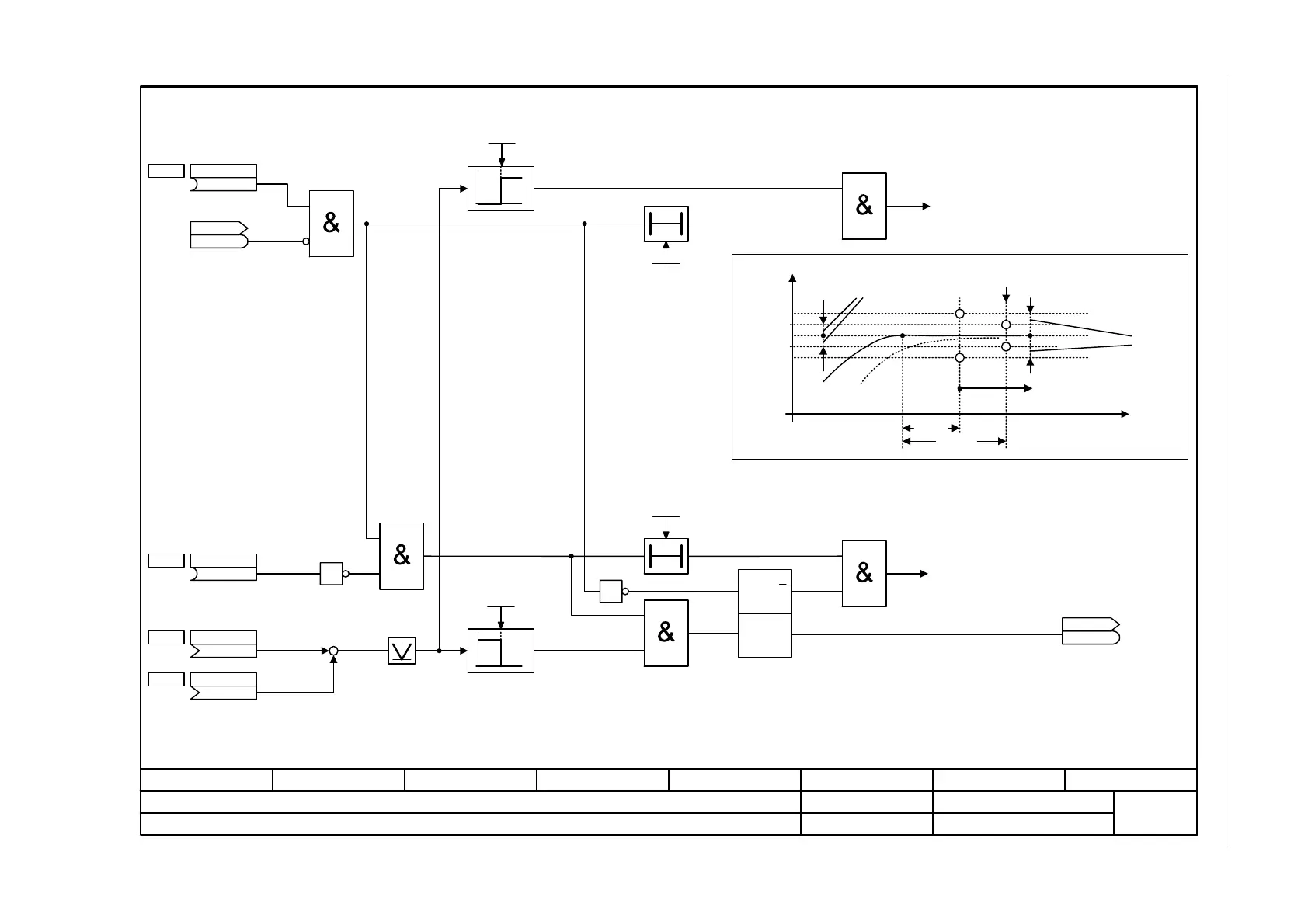
Fig. 3-104 4020 – Standstill monitoring / positioning monitoring
- 4020 -
Function diagram
87654321
fp_4020_97_55.vsd
Position control
G120D CU250D-2
09.12.2015 V4.7.6
Standstill monitoring / positioning monitoring
T0
0
1
F07450
1
T0
+
F07451
1
1
0
R Q
S
RESET
(Q=0)
Q
Q
SET
(Q=1)
p2543
p2545
p2542
p2544
t
[3645.7]
[3646.3]
(2683.2)
Mess setp fixed
p2551
(2684.15)
Sig trav_cmnd act
p2554
POS_ZSW1
r2683
r2683
Standstill window
0 ... 2147483647 [LU]
p2542 (200)
Pos_window
0 ... 2147483647 [LU]
p2544 (40)
t_standstill monit
0.00 ... 100000.00 [ms]
p2543 (200.00)
t_pos_monit
0.00 ... 100000.00 [ms]
p2545 (1000.00)
s_act
(2521[0])
p2532
s_set
(2665[0])
p2530
1 = Tracking active
.0
Standstill monitoring
Positioning monitoring
"Standstill monitoring has responded"
"Positioning monitoring has responded"
Single evaluation
during the positioning monitoring function
From here, the standstill
monitoring is cyclically evaluated
Target
position
Position
value
Position
actual value
Position
setpoint
1 = Target position reached
POS_ZSW2
r2684
r2684
.10
–
[3635.7]
r2665
[4010.7]
r2521
[3645.7]
r2683
[3646.7]
r2684

 Loading...
Loading...






