Servo control
4.13 Motor data identification
Drive functions
154 Function Manual, 11/2017, 6SL3097-4AB00-0BP5
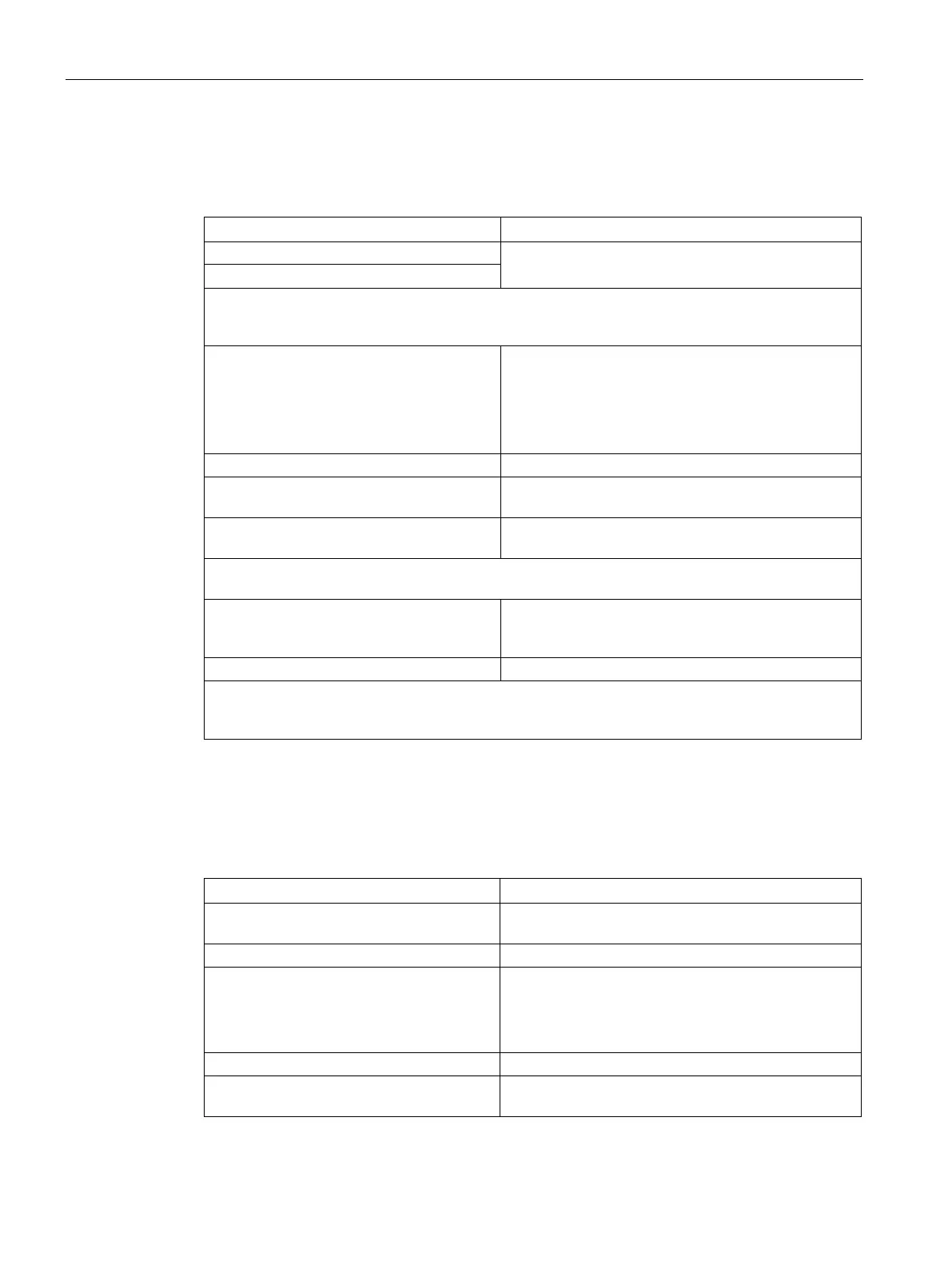
Table 4- 13 Data determined using p1960 for induction motors (rotating measurement)
Data that is accepted (p1960 = 1)
r1934 q inductance identified
-
r1935 q inductance identification current
The q inductance characteristic can be used as basis to manually determine the data for the current
controller adaptation (p0391, p0392 and p0393).
r1936 magnetizing inductance identified r0382 motor magnetizing inductance transformed
(gamma)
p0360 motor magnetizing inductance
p1590 flux controller P gain
p1592 flux controller integral time
r1948 magnetizing current identified
p0320 rated motor magnetizing current
r1962 saturation characteristic magnetizing
-
r1963 saturation characteristic stator induct-
-
Note:
The magnetic design of the motor can be identified from the saturation characteristic.
r1969 moment of inertia identified p0341 motor moment of inertia · p0342 ratio between
the total moment of inertia and that of the mo-
tor + p1498 load moment of inertia
r1973 encoder pulse number identified
The encoder pulse number is only determined with a very high degree of inaccuracy (p0407/p0408)
and is only suitable for making rough checks. The sign is negative if inversion is required (p0410.0).
Motor data identification synchronous motor
Table 4- 14 Data determined using p1910 for synchronous motors (standstill measurement)
Data that is accepted (p1910 = 1)
r1912 stator resistance identified p0350 motor stator resistance, cold
r1925 threshold voltage identified
r1932 d inductance p0356 motor stator leakage inductance
+ p0353 motor series inductance
p1715 current controller P gain
p1717 current controller integral time
r1934 q inductance identified
r1950 voltage emulation error
p1952 voltage emulation error, final value
 Loading...
Loading...

























