Basic functions
7.24 Terminal Module 41
Drive functions
Function Manual, 11/2017, 6SL3097-4AB00-0BP5
405
Detecting the zero mark position for new synchronization
If the number of encoder pulses has not been set equal to 2
n
(for example p0408 = 1000),
then after the higher-level controller has been reset, it is possible that the position of the next
zero mark cannot be determined from the actual position value xACT1 signaled from the
TM41. For this situation, the control can query the position of the next zero mark from
parameter r4427 using an acyclic read request.
Limit frequencies for TM41
● Adjustable pulse number (p0408): 32 to 16384 pulses/revolution (factory setting = 2048)
● The maximum pulse frequencies (limit frequencies) specified in the tables below must not
be exceeded.
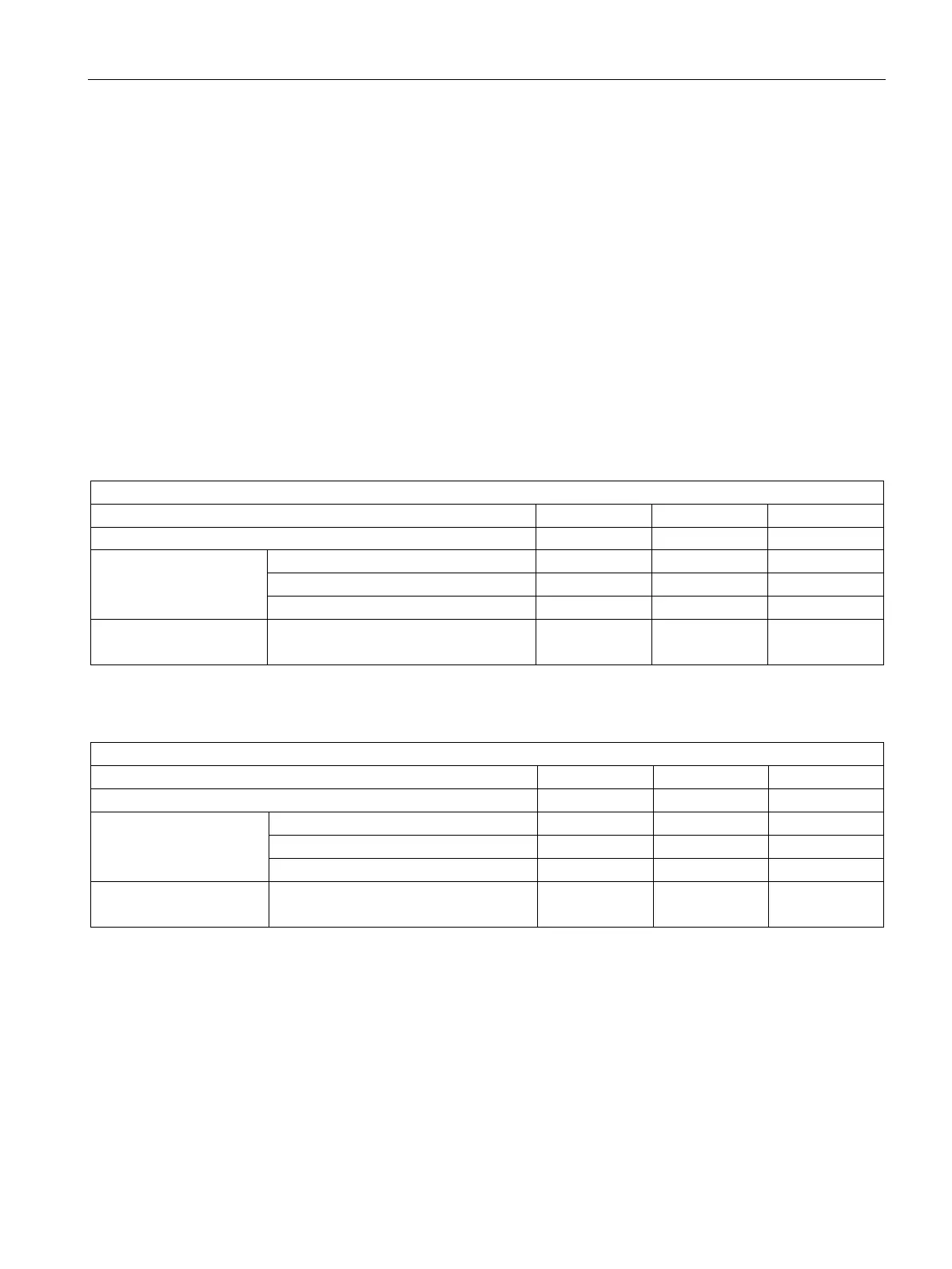
Table 7- 12 Maximum output frequencies for TM41 = 750 kHz (p4401.7 = 0)
Higher setpoint resolution not activated (p4401.5 = 0)
SINAMICS mode
p4400 = 1
max
Output frequency f
max
(p0418 = 17 bit)
512 kHz 256 kHz
128 kHz
max
SIMOTION mode
Output frequency f
max
1024 kHz 512 kHz
256 kHz
Table 7- 13 Maximum output frequencies for TM41 = 1024 kHz (p4401.7 = 1)
Higher setpoint resolution activated (p4401.5 = 1)
SINAMICS mode
p4400 = 1
max
Output frequency f
max
(p0418 = 17 bit)
max
SIMOTION mode
Output frequency f
max
1024 kHz 1024 kHz 1024 kHz
Following error monitoring
If the actual position can no longer follow the entered position setpoint characteristic, then
fault F35220 is output. In the SINAMICS mode, the frequency setpoint is limited to the
maximum output frequency. The maximum output frequency from the TM41 is transferred to
the Control Unit.
 Loading...
Loading...

























