System overview
2.3 Comparison of electric and hydraulic drive systems
Hydraulic Drive
30 System Manual, 04/2015, 6SL3097-4BA00-0BP1
Comparison of electric and hydraulic drive systems
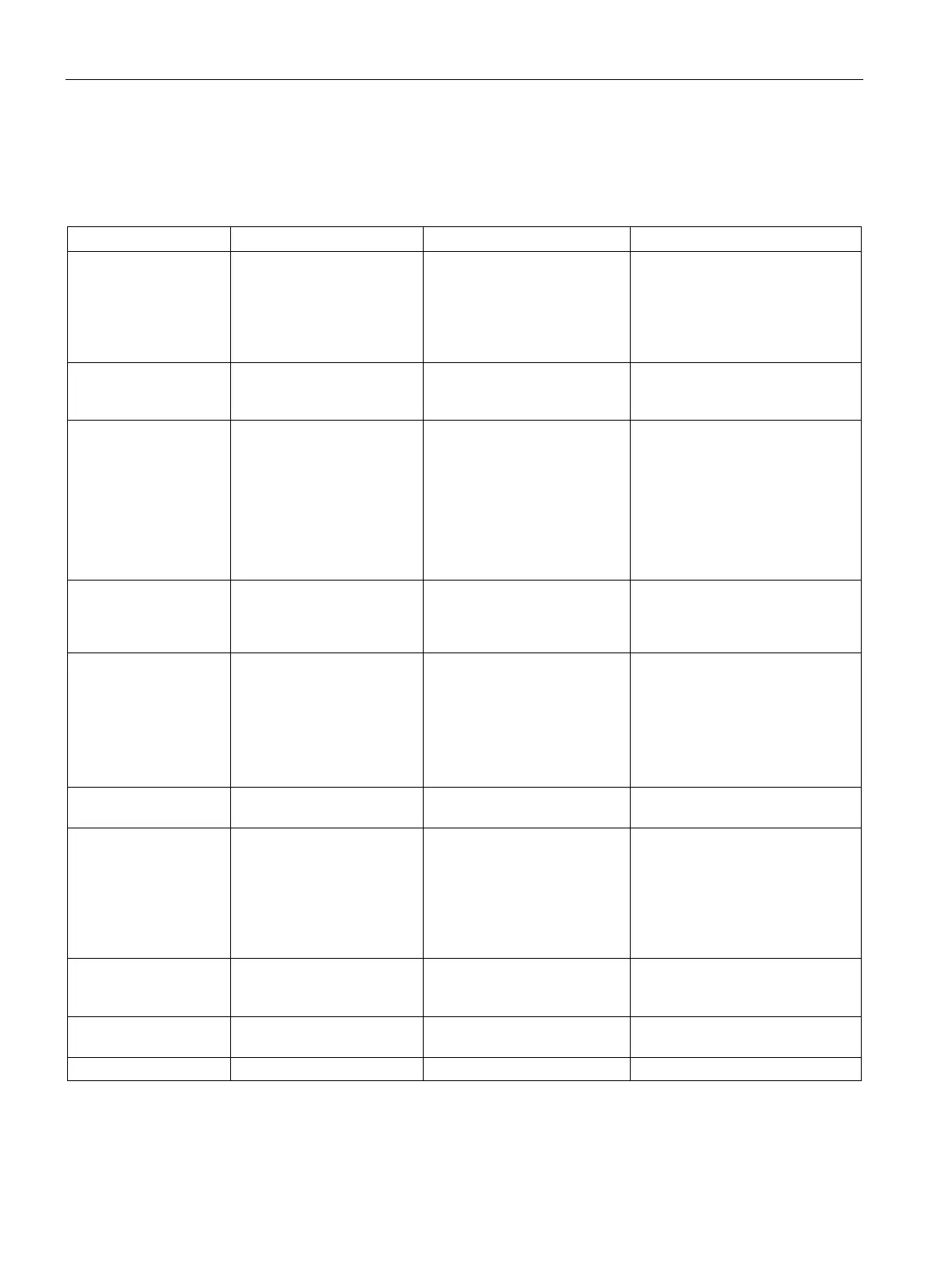
Table 2- 1 Comparison of electric and hydraulic drive systems
Electric drive with leadscrew
Power density /
space requirement
• Low weight
• Lower space require-
ment of the electrical
section on the machine
table.
• Servomotor and leadscrew
large and heavy.
• Problematic where mount-
ing space is restricted
• Cylinder and servo solenoid
valve are light and compact.
• The electric motor is shifted to
the hydraulic unit
Moment of inertia of
moving parts
Low weight of the electrical
section on the machine
Servomotor and leadscrew
have high moments of inertia
Piston and piston rod have very
low weights
Operational safety,
service life
In principle, the service life
only depends on the linear
guides
• Shock sensitive
• Service life is limited by
leadscrew
• Sudden failure is possible
• Protected against overload
through pressure limiting
• Sturdy, insensitive to shock
• Cylinder seals and valve con-
trol edges have long service
lives.
• Wear warning
Service Simple replacement Complex replacement and
repair of leadscrew by special-
ists
• Simple fault diagnostics
•
Simple replacement and repair
of valves and cylinders
Energy storage Peak requirement must be
installed as no storage is
possible
Peak requirement must be
installed as no storage is pos-
sible
• Compensation of energy re-
quirement peaks using a hy-
draulic accumulator
• Rapid traverse in a differential
connection
• Reduction of installed power
Maximum forces Peak thrust per unit area
2
High forces are limited Practically unlimited
(cylinder diameter, p
max
= 700 bar)
Load stiffness Very good;
Servo gain (Kv) can be set
10-100 times higher than on
the other two drives.
• Elasticity when large forc-
es are involved
• Elasticity of leadscrew is
largely compensated using
closed-loop control
• Oil compressibility is compen-
sated using closed-loop con-
trol (I component)
• Good zero overlap quality of
valve ensures very high load
stiffness
Maximum velocity Up to 500 m/min v
max
= h
s
× ω
max
/2π
h
s
= pitch
ω
max
= maximum motor speed
30 ... 300 m/min
(depending on the cylinder sealing
set)
Maximum traversing
Unlimited ≤6 m ≤3 m
 Loading...
Loading...

























