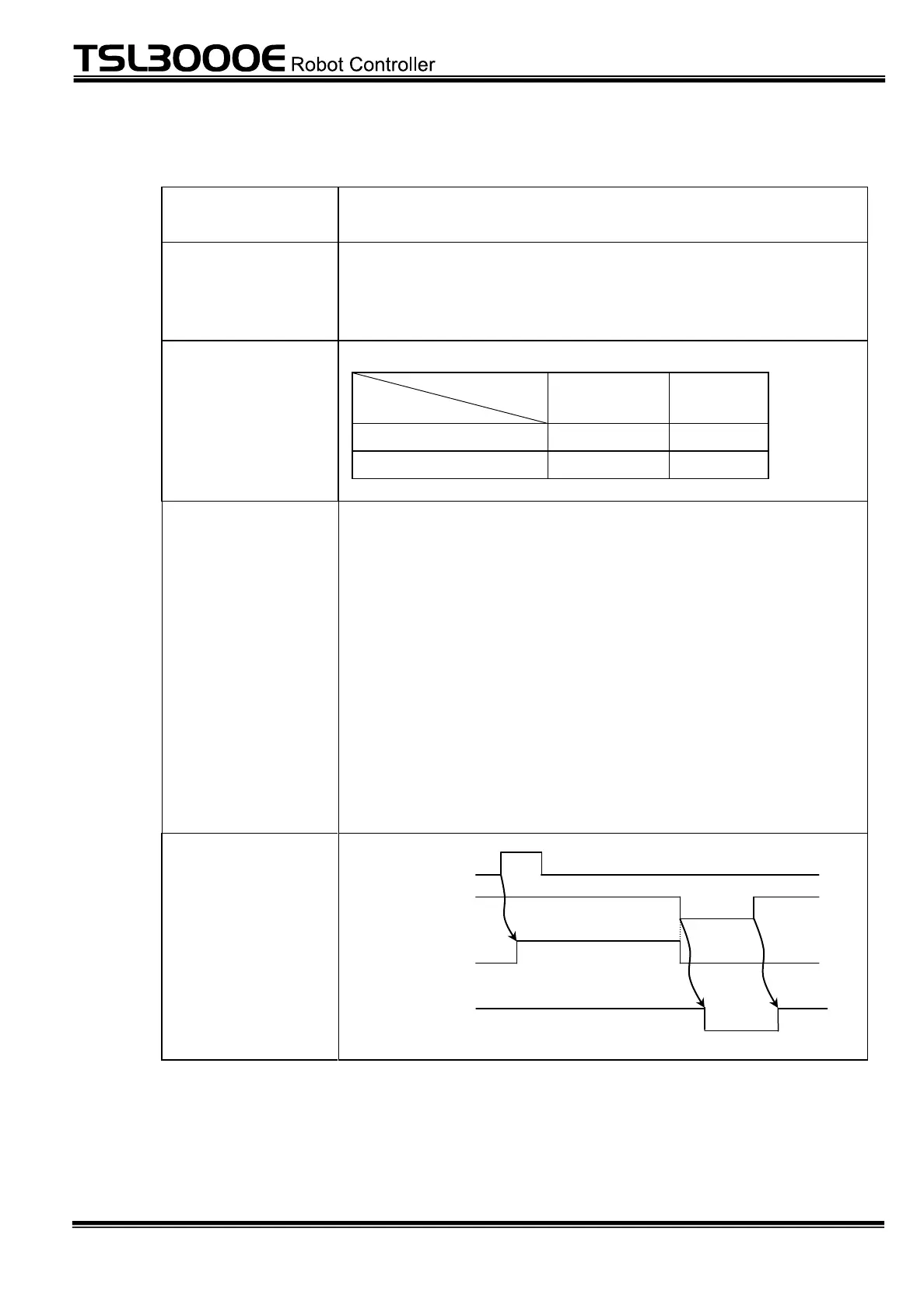
Between SAFE-3 and SAFE-4
(emergency stop contact input 1)
Between SAFE-5 and SAFE-6
(emergency stop contact input 2)
Used to emergency stop the robot from the external
equipment.
While this signal is open, the processing of robot
emergency stop is executed.
Use this signal by connecting the external emergency stop
switch.
When the emergency stop input contact is open,
emergency stop contact output is open between
EMG-COM* and EMG-*a.
When emergency stop latch reset is input while emergency
stop input contact is short-circuited, emergency stop
contact output is short-circuited between EMG-COM* and
EMG-*a.
Emergency stop contact output is c-contact. Use this signal
in accordance with the customer’s specifications.
 Loading...
Loading...








