your position is our focus
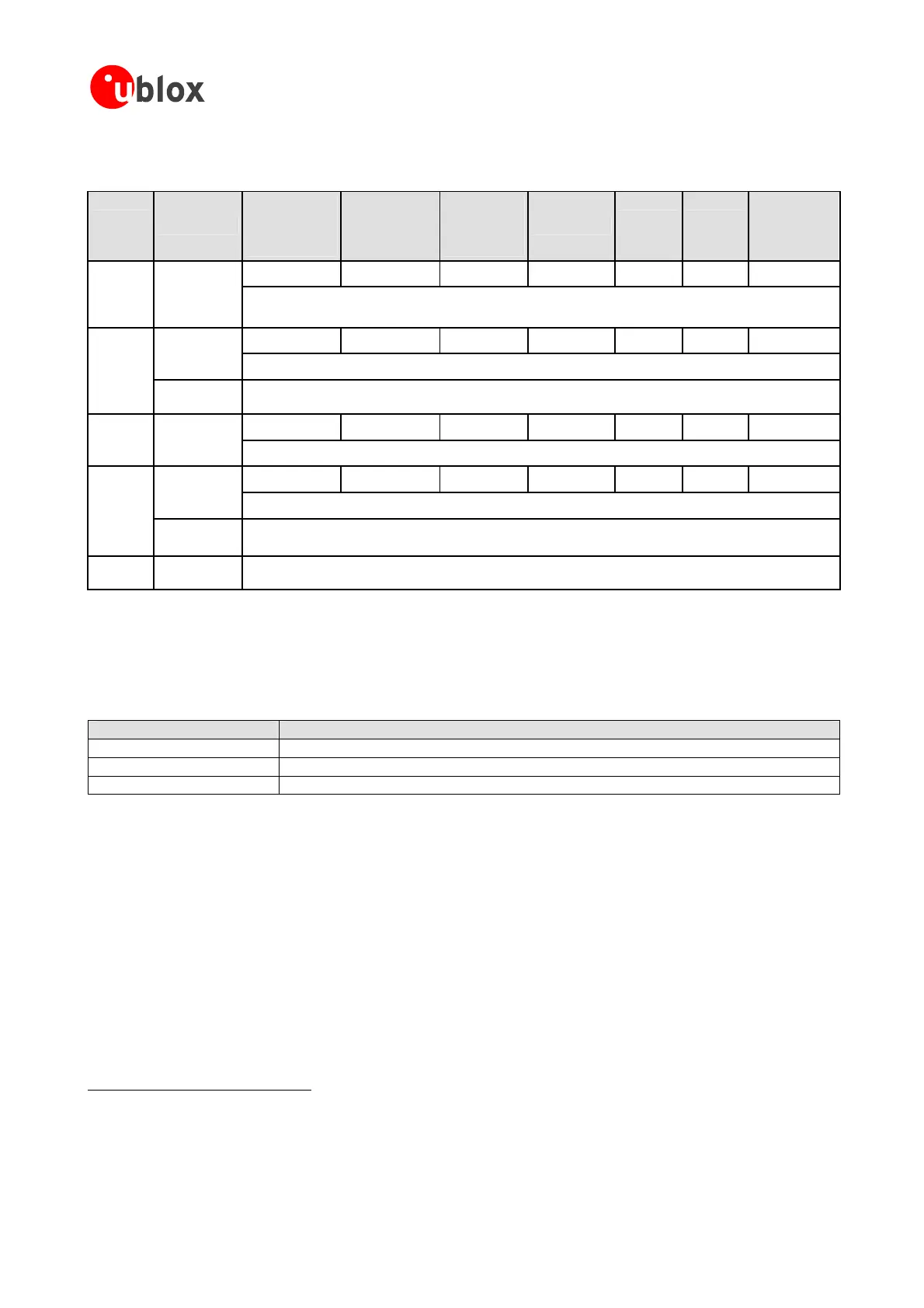
Table 33 lists of the status fields (valid flags) for the different NMEA message for NMEA standard 0183
Version2.2andsmaller:
NMEA
Message
Field
NoPositionFix
(afterpower-up,
afterlosing
Satellitelock)
ValidPositionFix
butUser
Limitsexceeded
Dead
Reckoning
(linearextra-
polation)
EKF
14
2DPosition
Fix
3D
PositionFix
Combined
GPS/EKF
PositionFix
0 0 1 1 1/2 1/2 1/2
GGA Status
notavailable/invalid,
15
GPS,SPS
de,FixValid
0=Fix
Mo
1=GPSSPSMode,Fixvalid ,Estimated/DeadReckoning,2=Differential
V V A A
16
A A A
Status
D,V=DataIn A=DataVALI valid(NavigationReceiverWarning)
GLL
ModeIndicator
NotavailableinthisNMEAversion
1 1 2 2 2 3 3
GSA NavMode
1=FixNotavailable,2=2DFix,3=3DFix
V V A A A A A
Status
A=DataVALID,V=DataIn avigationReceiverWarning)valid(N
RMC
ModeIndicator
NotavailableinthisNMEAversion
VTG ModeIndicator
NotavailableinthisNMEAversion
Table 33: NMEA Valid Flag (0183 Version 2.2 and smaller)
NMEA Output in case of invalid position fixes
T IS
®
4 GPS Technology ut
comma-separatedfieldsforpositio
he ANTAR
will notoutput data in case of invalidposition fixes. Bydefault, it will outp
n,velocityandtimeasdepictedinTable 34.
Data Validity GGA Output
Invalidtimeandinvalidposition
$GPGGA,,,,,,0,0,99.99,,,,,,0*48
Validtime,invalidpositionfix
$GPGGA,125749.00,,,,,0,0,99.99,,,,,,0*6A
Validtimeandpositionfix
$GPGGA,125822.00,4717.11387,N,00833.91113,E,1,4,2.15,498.4,M,48.0,M,,0*57
T are ≥V3.00)
Itisalsopossibletoconfigurerece
able 34: NMEA Output in case of invalid position fixes (Firmw
iverstooutputaswellinvalidsolutions(pleasereferttoSection 4.4.4.2)
14
TIM-LR/DRenabledreceiversonly
15
For DR enabled receiver a valid fix is always acombination of a GPS fix with a DR position based on the attached DR sensor (turn rate
ter)-
ledreceiverstheEKFonlyfixisconsideredas
sensor,odome
16
ForDRenab validaslongasit’sinthedefinedaccuracyrange.
GPSModules-SystemIntegrationManual(SIM)(incl.ReferenceDesign) ReceiverDescription
GPS.G4-MS4-05007-A1
Page 103
 Loading...
Loading...

