The drive unit
30
Levelling control
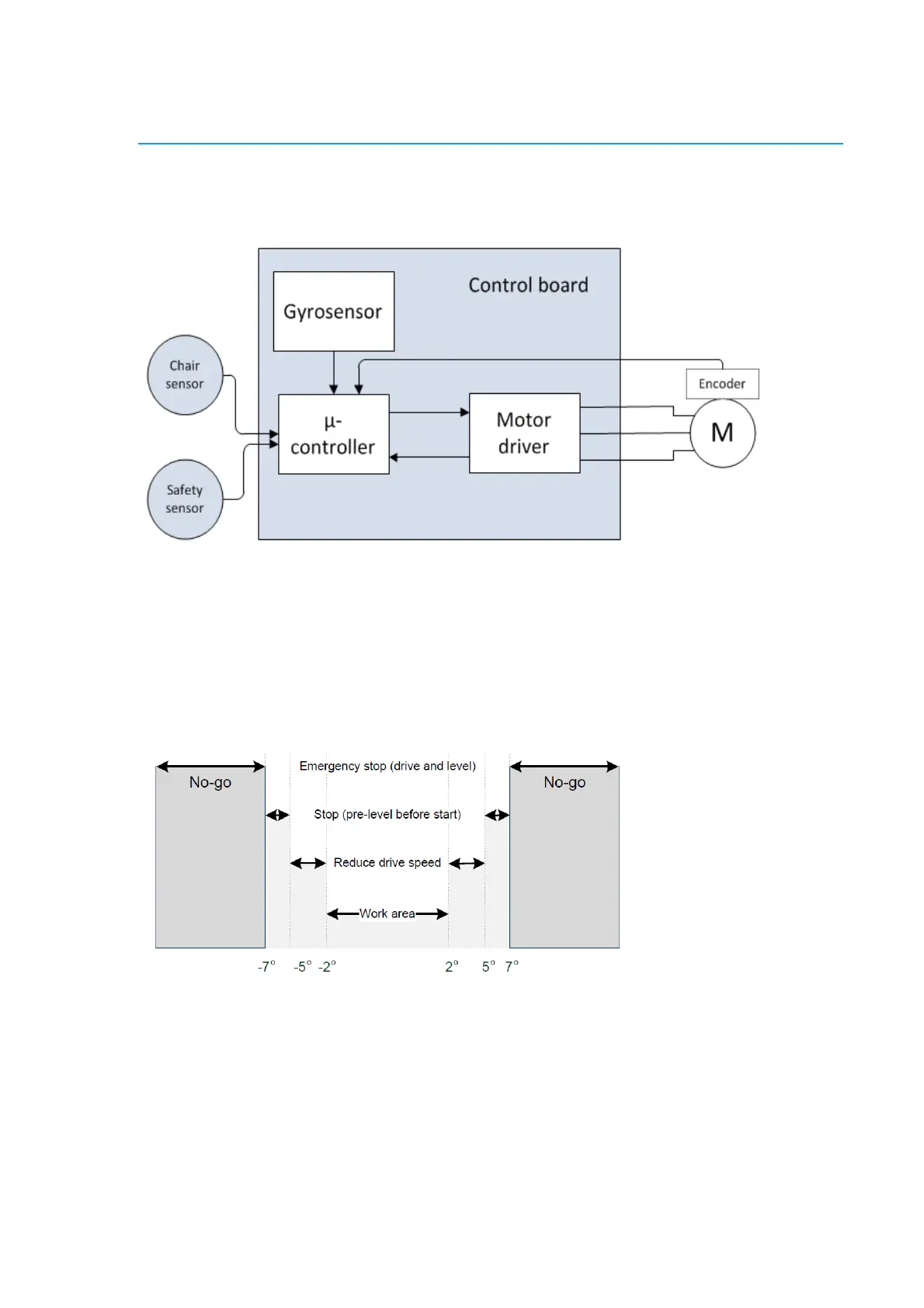
Figure 4-13: Principle of level motor control system
During normal operation the levelling control will attempt to maintain the chair base level within ±0.5⁰. When the
chair base is tilted beyond ±2⁰, measured by the chair sensor, the levelling control will temporarily reduce the stairlift
speed to reduce the influence of a moving stairlift on the levelling. This temporary speed reduction will limit the
speed to 40mm/s ±5% as long as the chair base is tilted beyond ±2⁰ and for at least 1s ±5%.
When the chair base is tilted beyond ±5⁰, measured by the chair sensor, the stairlift will perform a normal stop.
When the chair sensor measured a tilt beyond ±7⁰ the levelling control will initiate an emergency stop. An overview
of this behaviour is given in figure below.
Figure 4-14: Overview of levelling behaviour
When the deviation between chair sensor and safety sensor is beyond ±4⁰ for more than 2 s a warning signal will be
raised and the maximum speed will be reduced to 40mm/s. The user can still use the lift to move to a safe halt
position.
When the deviation between chair and safety sensor is beyond ±5⁰ for more than 2 s an error will be raised and the
stairlift will be stopped.