Arkbird
2. Controls the steering angle as Taxiing Rectifying Gyro( 2 Way )
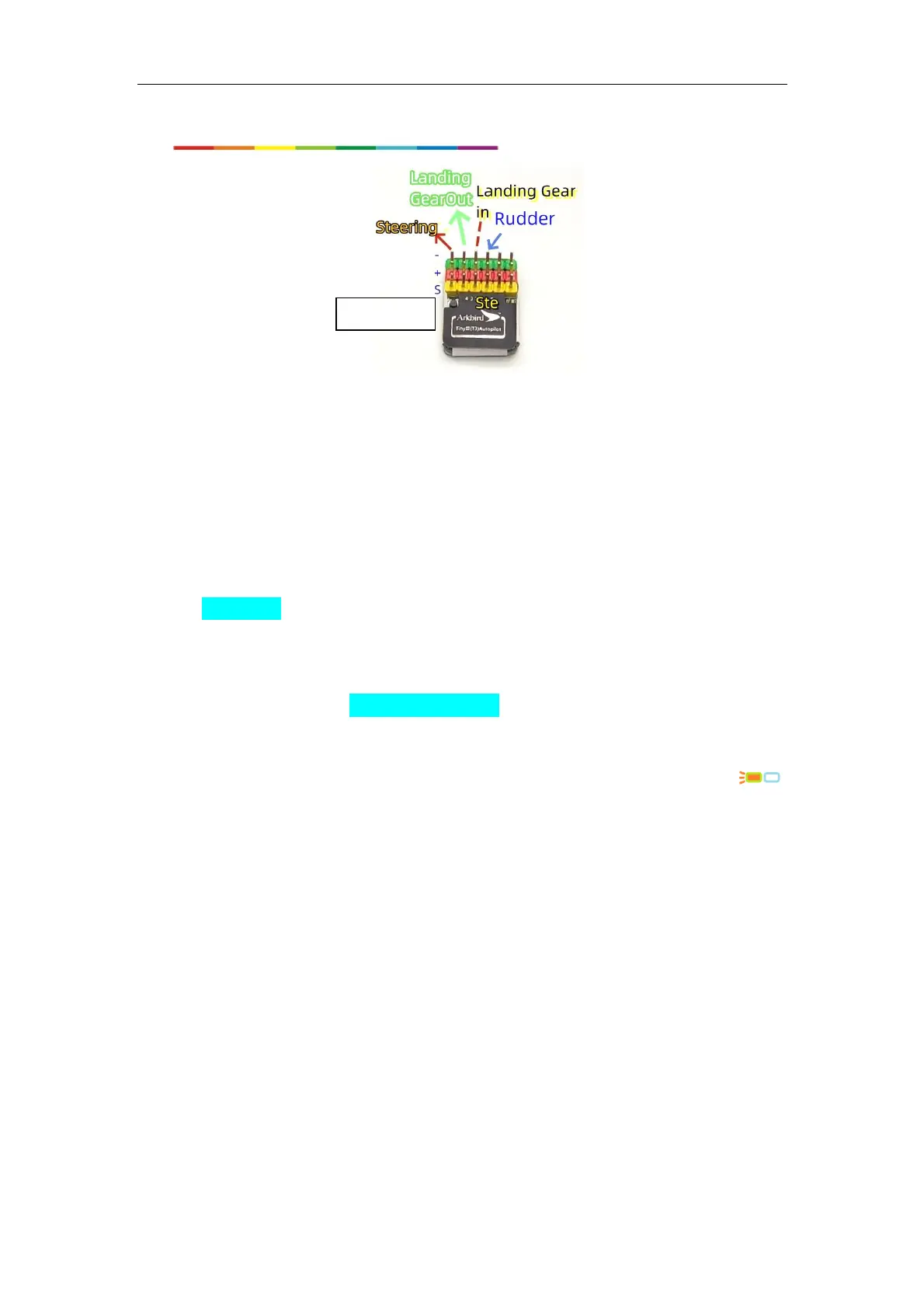
1.Connect receiver’s channel 4(Rudder PWM) to Pin 1, receiver’s landing gear channel to Pin2(if
not connected , the correcting will be enabled continuously),
Autopilot’s channel 3 is output to landing gear, Autopilot’s channel 4 to wheel steering servo,
Autopilot automatically detects PWM input in 5 seconds after power on.
2.Connect the receiver SBUS/PPM to the Autopilot’s SBUS/PPM port. (At this time, channels 5
and 6 cannot connect to other functional loads (such as landing gear, flaps, brakes, navigation
light switches, etc.) Channels 5 and 6 are the tuning channels. Switch the lever 5 times in channel
6 to enter the menu, and select the corresponding setting option based on the number of lever
switches in channel 5.
The 7th channel of the SBUS/PPM receiver (cannot be changed) is landing gear Channel , to
enabled or disable the channel for front wheel correction,
After the landing gear is lowered for 5 seconds, the correction is enabled. if there is reversed
control logic of the landing gear, press the setting button 5 times to enter calibration, and then
turn the landing gear channel up and down 5 times to adjust the reverse direction (the same
method is used when the problem occurs in the SBUS/PPM connection).
If the Gyro correction direction needs to be adjusted(Move the nose to right and the outputs
make the go right more), lightly press the setting button 5 times (yellow on and blue off )
to enter the waiting time for setting the direction (yellow and blue flashing quickly). At this time,
turn the direction Rudder input joystick to the left or right. After setting it, the yellow and blue
lights will stop flashing; If the direction has not been changed, please operate again and input the
other side of the joystick.
Attention!!!
① If the aircraft is lifted and the pitch or roll angles > 40 degrees, the correction will
immediately stop;
② If using the PPM/sbus port. Correction requires switching 5, 6 channels 11 times to
enabled (See page 11), otherwise is Autopilot balance rudder output.
③ If using the PPM/sbus port, When using the aileron (CH [1]), the correction will
immediately stop;
④ If the aircraft altitude is greater than 5m, the correction will immediately stop (when
GPS is connected);
⑤ The landing gear channel is lowered (CH7 for PPM/sbus, second pin for PWM
connection), and the correction is activated after 5 seconds;
So you can observe the mechanical position of the steering servo by flipping the aircraft and
 Loading...
Loading...