6. Microstep Resolution and Driver Current Output
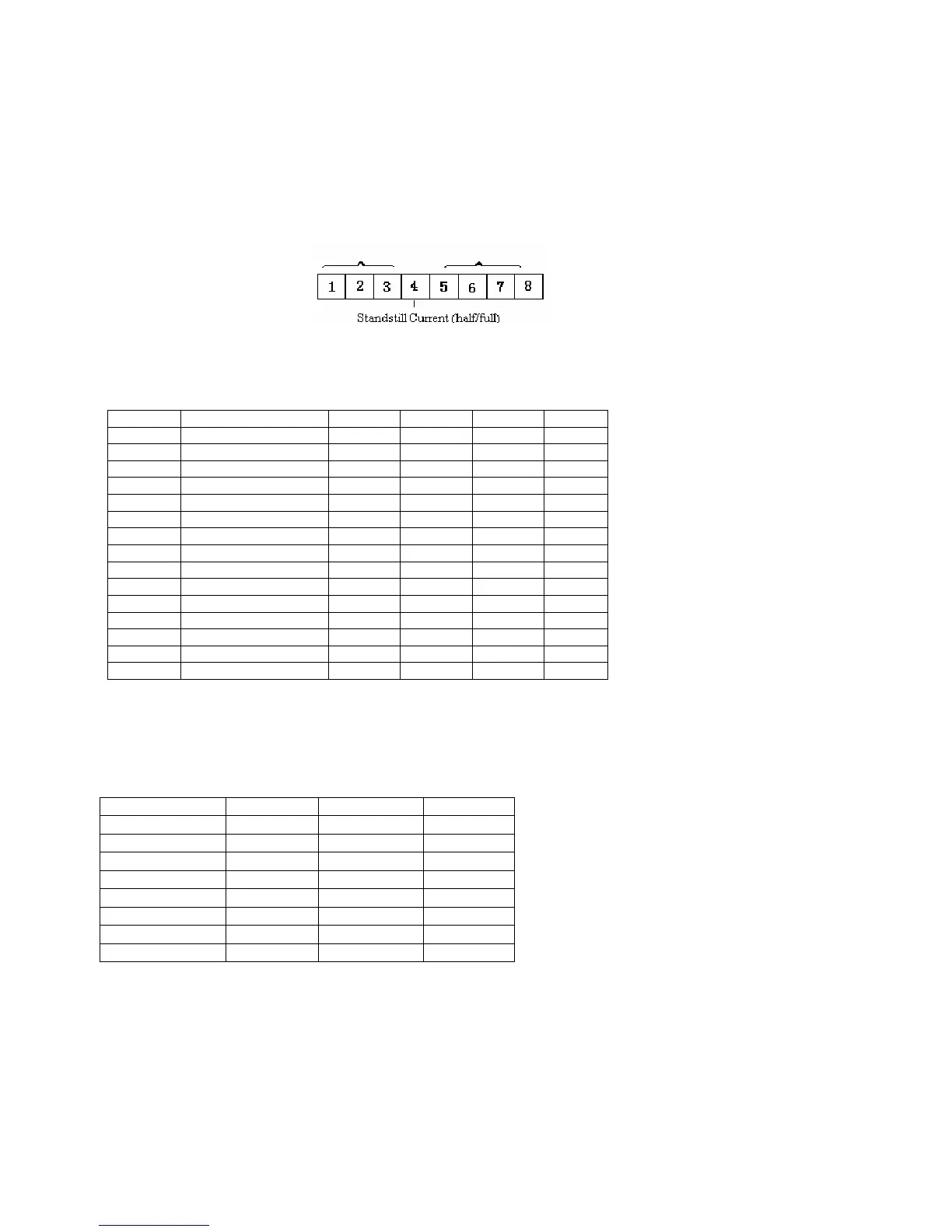
This driver uses an 8-bit DIP switch to set microstep resolution, dynamic current and standstill current,
as shown below:
Current during motion Microstep resolution
Microstep Resolution Selection
Microstep resolution is set by DIP SW5, 6, 7, 8 as shown in the following table:
Microstep Step/rev.(for 1.8°motor) SW5 SW6 SW7 SW8
0 No rotation off off off off
2 400 on on on on
4 800 on off on on
8 1600 on on off on
16 3200 on off off on
32 6400 on on on off
64 12800 on off on off
128 25600 on on off off
256 51200 on off off off
5 1000 off on on on
10 2000 off off on on
25 5000 off on off on
50 10000 off off off on
125 25000 off on on off
250 50000 off off on off
Current Setting
The first three bits (SW1, 2, 3) of the DIP switch are used to set the current during motion (dynamic
current), while SW4 is used to select standstill current.
P808 DIP Selection for current during motion:
Current for P808 SW1 SW2 SW3
2.8A on on on
3.5A off on on
4.2A on off on
4.9A off off on
5.7A on on off
6.4A off on off
7.0A on off off
7.7A off off off
Note: due to motor inductance, actual coil current may be smaller than dynamic current settings, particularly at higher speeds.
DIP Selection for current during standstill:
SW4 is used for this purpose, current setting due to coil inductance. OFF meaning that the standstill
current is set to be half of the dynamic current and ON meaning that standstill current is set to be the
same as dynamic current.
Astrosyn International Technology Ltd, The Old Courthouse, New Rd Ave, Chatham, Kent ME4 6BE, England
Tel: +44(0)1634 815175 Fax: +44(0)1634 826552