Configuring Network Settings
Follow the “Network Setup” instructions on the BlueROV2#Software#Setup#page for
establishing a connection with your BlueROV2 to QGroundControl.
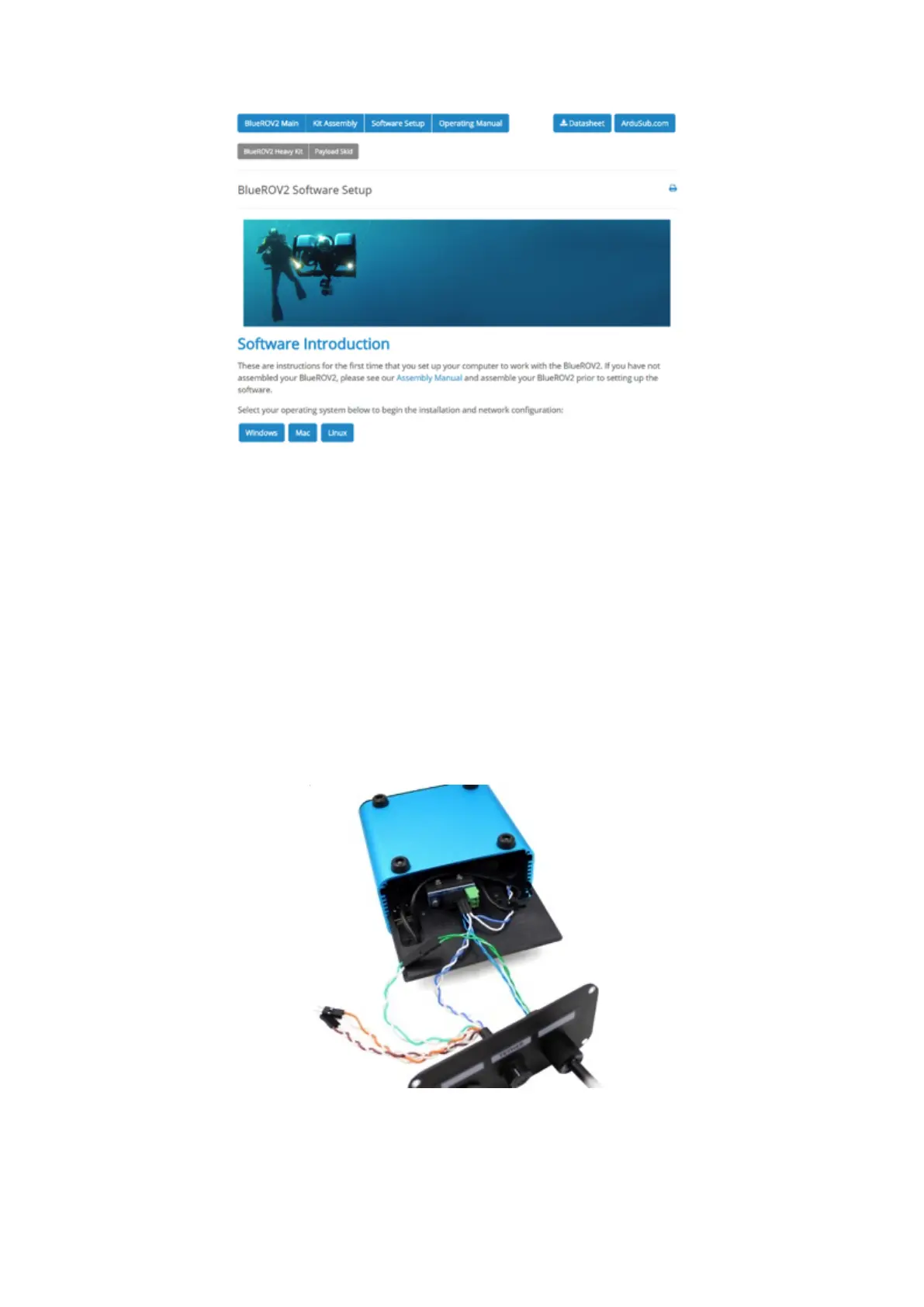
Integration Examples
FXTI is highly expandable allowing for reconfiguring connections within the box so that you
can quickly use an extra twisted pair from the tether for the Water Linked Analog Locator
or any RS485 device.
Pololu carries the 3 position 0.1” (2.54mm) Crimp Connector Housings and female crimp
pins that may be used for connecting your own devices to the spare tether terminations.
Water Linked Underwater GPS / BlueROV2 Integration Kit
Below is one example of how FXTI can be used to neatly connect the Water Linked
Underwater GPS / BlueROV2 Integration Kit and omit the earlier connections to a terminal
block.
Next Steps
First, set up the software on your topside computer. Please see our Software Setup page.
Next, refer to the Operating Manual to learn how complete your first dive.