VLT
®
5000 SyncPos option
MG.10.J4.02 – VLT is a registered Danfoss trade mark
102
Software Reference
■■
■■
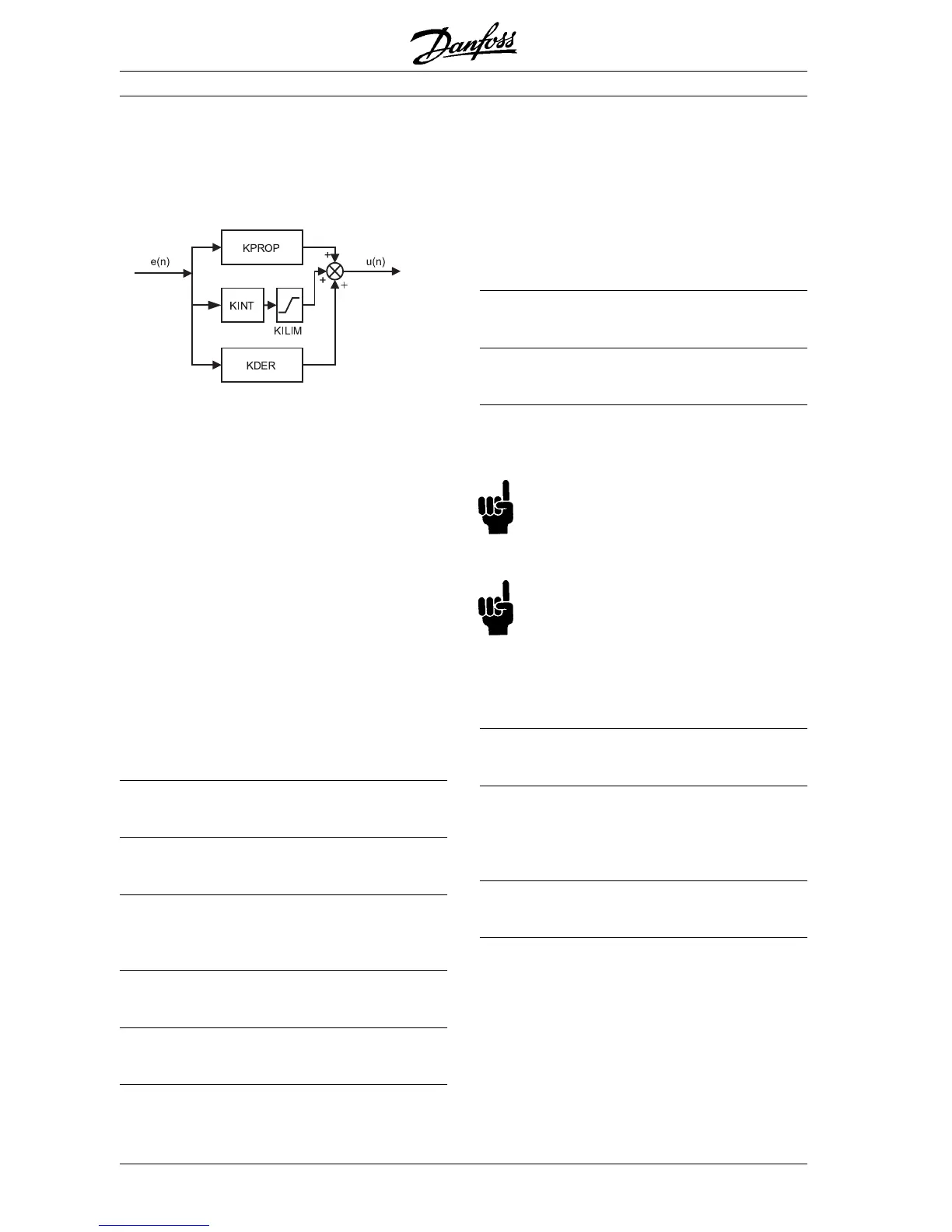
■ PID
A PID filter can be calculated with this function. The
PID filter works according to the following formula:
u(n) = ( k
p
* e(n) + k
d
*(e(n)-e(n–1)) + k
i
*∑e(n) ) / timer
where the following is true:
e(n) error occurring at time n
k
p
proportional factor of the PID control
k
d
derivative factor
k
i
integral factor (limited by Integration
Limit)
Timer controller sample time
The corresponding factors can be set with the
following commands:
SET PID KPROP 1 /* set kp 1 */
SET PID KDER 1 /* set kd 1 */
SET PID KINT 0 /* set ki 0 */
SET PID KILIM 0 /* Integration limit 0 */
SET PID TIMER 1 /* Sample time = 1 */
The following syntax examples which also show the
default allocation of the factors.
Summary
calculates PID filter
Syntax
u(n) = PID e(n)
Parameter
e(n) = actual deviation (error) for which the PID filter
should be used
Return value
u(n) = result of the PID calculation
Command group
I/O
Syntax-Example
e = INAD 53
u = PID e
PRINT “input = “,e, “output = “,u
■■
■■
■ POSA
The axis can be moved to a position relative to the
actual zero position.
When the POSA command exceeds the software
limit switch NEGLIMIT (4) or POSLIMIT (5) the
program continue with the next command after an
error.
Summary
Positioning in relation to actual zero point
Syntax
POSA p
Parameter
p = Position in user units (UU) absolute to the
actual zero point; the UU corresponds in the
standard setting the number of Quadcounts.
NB!
If a temporary zero point, set via SET
ORIGIN, exists and is active, then the posi-
tion result refers to this zero point.
NB!
If an acceleration and/or velocity has not
been defined at the time of the POSA com-
mand, then the procedure will take place with the
values of parameter DFLTVEL (33) and DFLTACC
(34).
Command group
ABS
Cross Index
VEL, ACC, POSR, HOME, DEF ORIGIN, SET
ORIGIN
Parameter: POSFACT_N (26), POSFACT_Z (23)
Syntax-Example
POSA 50000 /* move axis to position 50000 */
Program sample
POS_01.M
 Loading...
Loading...






