VLT
®
FCM Series
Note that the bus reference can only be preset
via serial communication.
NB!:
It is best to preset terminals that are not
being used to No function [0].
D
ifferentiator gain limit
If very rapid variations occur in an application in either
the reference signal or the feedback signal, the deviation
between the reference/setpoint and the process’s
actual mode will change quickly. The differentiator
can then become too dominant. This is because it
is reacting to the deviation between the reference
and the process’s actual mode, and the quicker the
variance changes the more powerful the differentiator’s
frequency contribution becomes. The differentiator’s
frequency contribution can therefore be limited in such a
way that both a reasonable differentiation time for slow
changes and an appropriate frequency contribution
for quick changes can be preset. This is done using
parameter 443 Process P ID Differentiator gain limit.
L
owpass filter
If there is a lot of noise in the feedback signal, these
can be dampened using an integrated lowpass filter.
A suitable lowpass filter time constant is preset.
If the lowpass filter is preset to 0.1 s, the cut-off
frequency will be 10 RAD/sec, corresponding to (10 / 2
x π) = 1.6 Hz. This will mean that all currents/voltages
that vary by more than 1.6 oscillations per second
will be dampened. In other words, there will only
be regulation on the basis of a feedback signal
that varies by a frequency of less than 1.6 Hz. The
appropriate time constant is selected in parameter
444 Process PID lowpass filter time.
I
nverse regulation
Normal regulation means that the motor speed is
increased when the reference/setpoint is greater than
the feedback signal. If it is necessary to run inverse
regulation, in which the speed is reduced when
the reference/setpoint is greater than the feedback
signal, parameter 437 PID normal/inverse control
must be programmed at Inverted .
A
nti Windup
In the factory the process regulator is preset with
an active anti windup function. This function means
that when either a frequency limit, a current limit or
a voltage limit is reached, the integrator is initialised
at a frequency corresponding to the present output
frequency. This is a means of avoiding the integration
of a variance between the reference and the process’s
actual mode that cannot be deregulated by means of
a change of speed. This function can be deselected
in parameter 438 Process PID anti windup.
S
tarting conditions
In some applications the optimal setting of the
process regulator will mean that a relatively long
period of time will pass before the required process
condition is achieved. In these applications it can
be a good idea to define an output frequency to
which the frequency converter must run the motor
before the process regulator is activated. This is
done by programming a start frequency in parameter
439 Process PID start frequency.
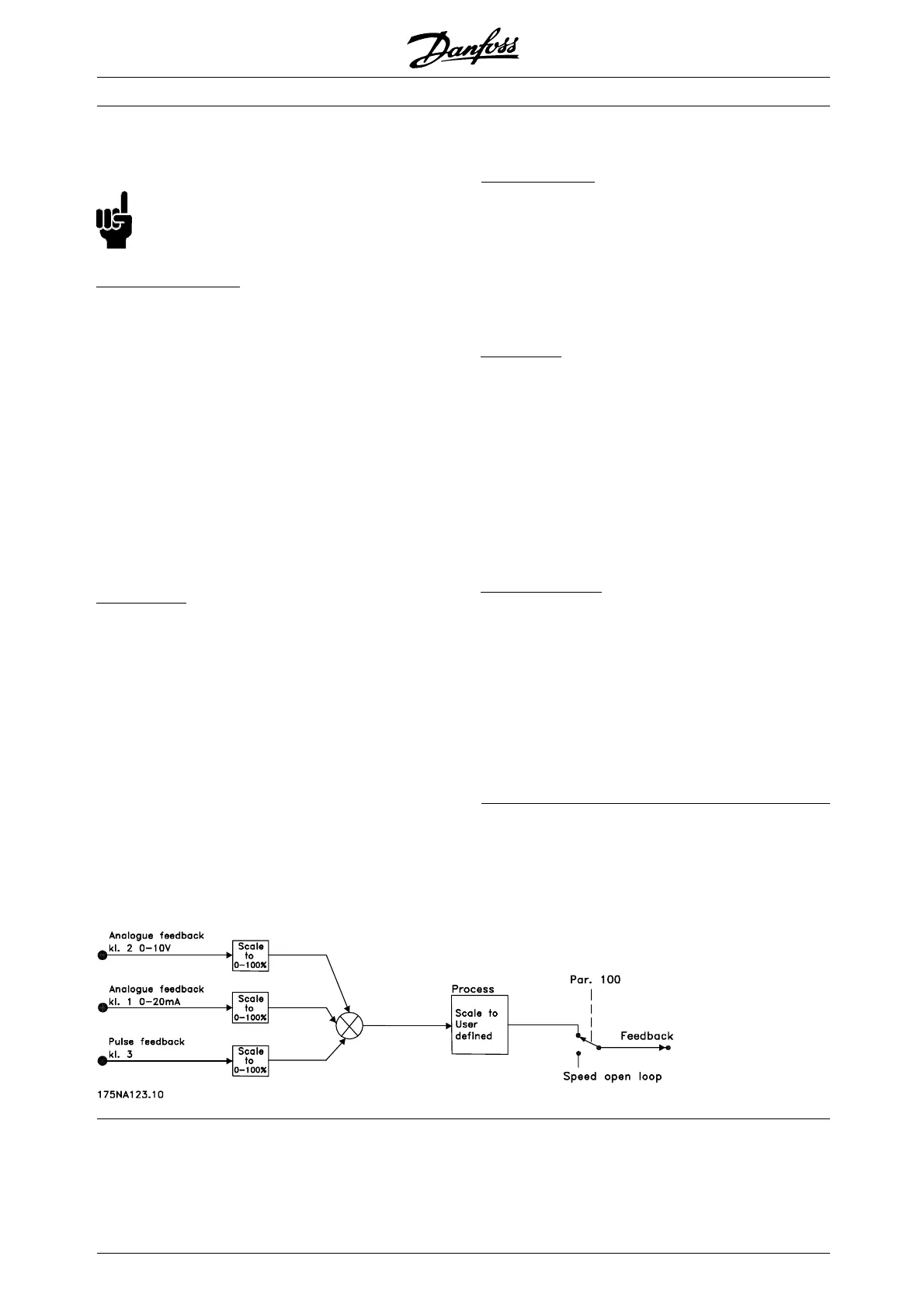
■ Handling of feedback
Feedback handling is depicted in this flowchart.
The flowchart shows which parameters can affect the
handling of feedback and how. A choice can be made
between voltage, current and pulse feedback signals.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.03.H3.02 - VLT is a registered Danfoss trademark
64

 Loading...
Loading...
