145
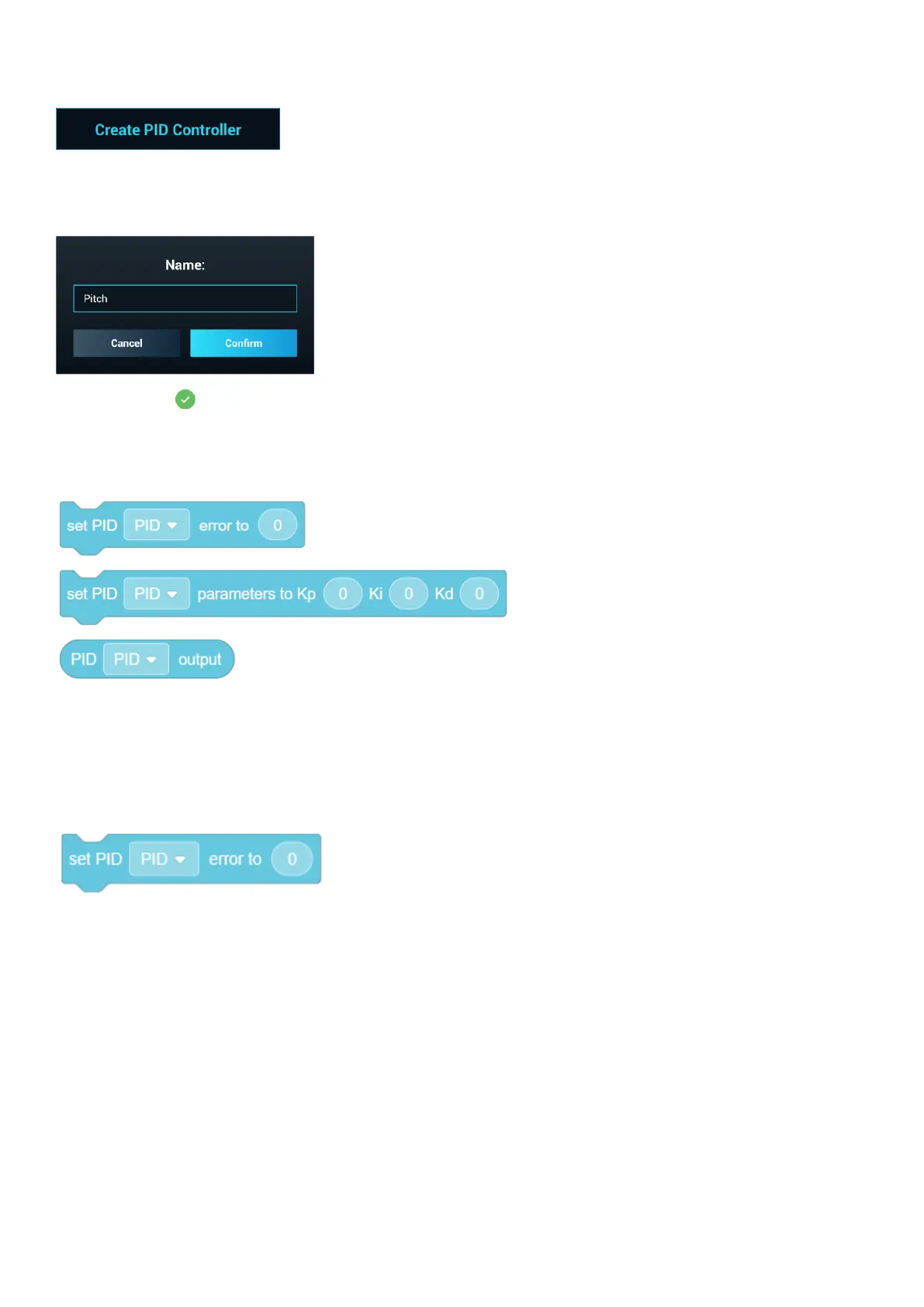
17. Create PID controller
(1) Description: Create and names a PID controller
(2) Type: Settings block
(3) Example: Name controller
Note: After the controller is created, there will be three modules available to configure error settings, adjust parameters, and
obtain output information.
Python API:
Class: rm_ctrl.PIDCtrl( )
18. Set PID (#PID#) error to (0)
(1) Description: Set the PID controller error, which is the difference between the target and returned values
(2) Type: Settings block
(3) Example: EP CORE’s line follow