33
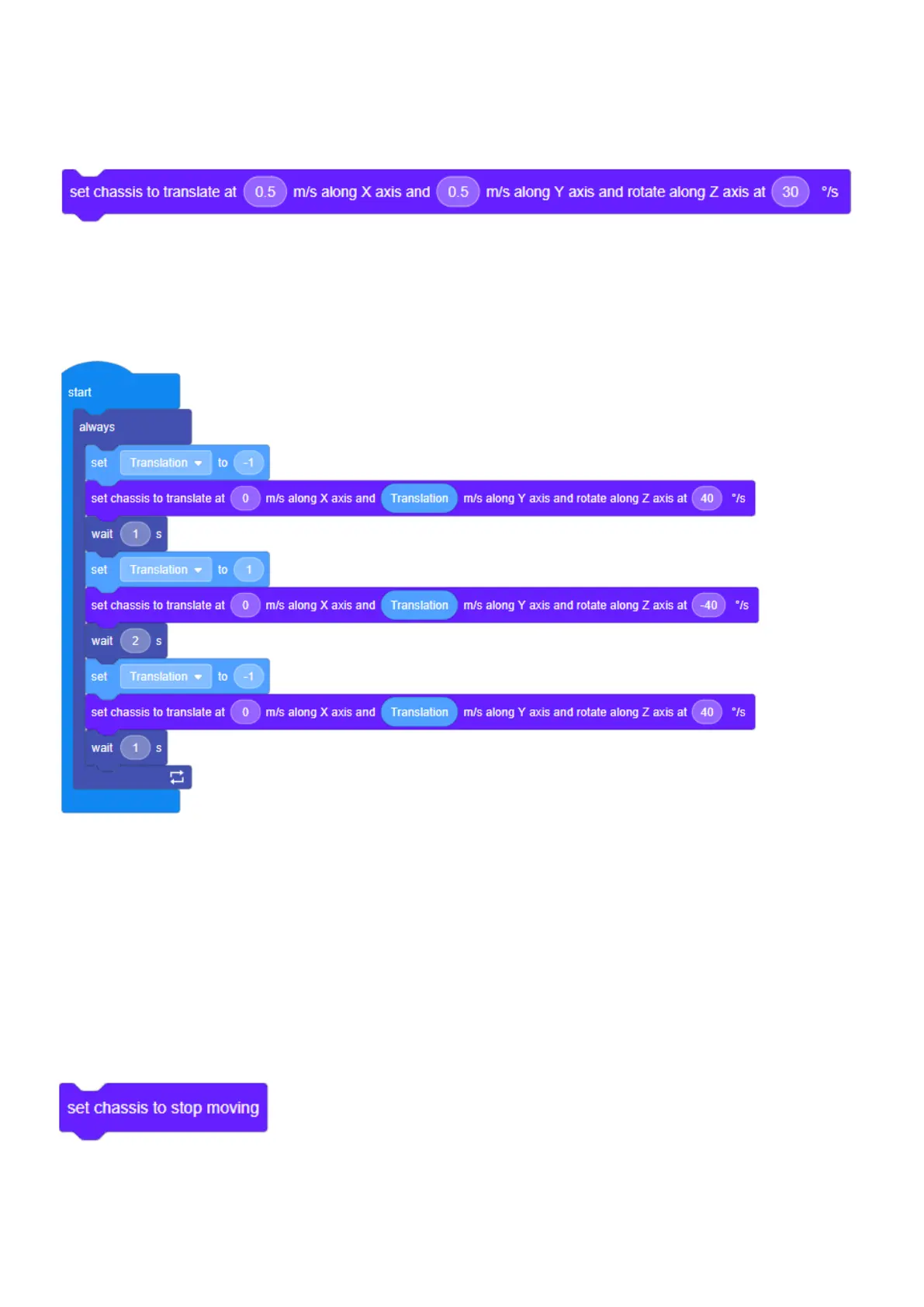
15. Set chassis to translate at (0.5) m/s along X axis and (0.5)m/s along Y axis and rotate
along Z axis at (30)°/s
(1) Description: Set the chassis to translate in a specified direction and at a specified speed
(2) Type: Execution block
(3) Example: Dishwashing moves
Python API:
Function: chassis_ctrl.move_with_speed(speed_x, speed_y, speed_rotation)
Parameters:
● speed_x(float): [0, 3.5] m/s
● speed_y(float): [0, 3.5] m/s
● speed_rotation(int): [-600, 600] °/s
16. Set chassis to stop moving
(1) Description: Stop all chassis movements
(2) Type: Execution block
(3) Example: EP CORE rotates right and stops