71
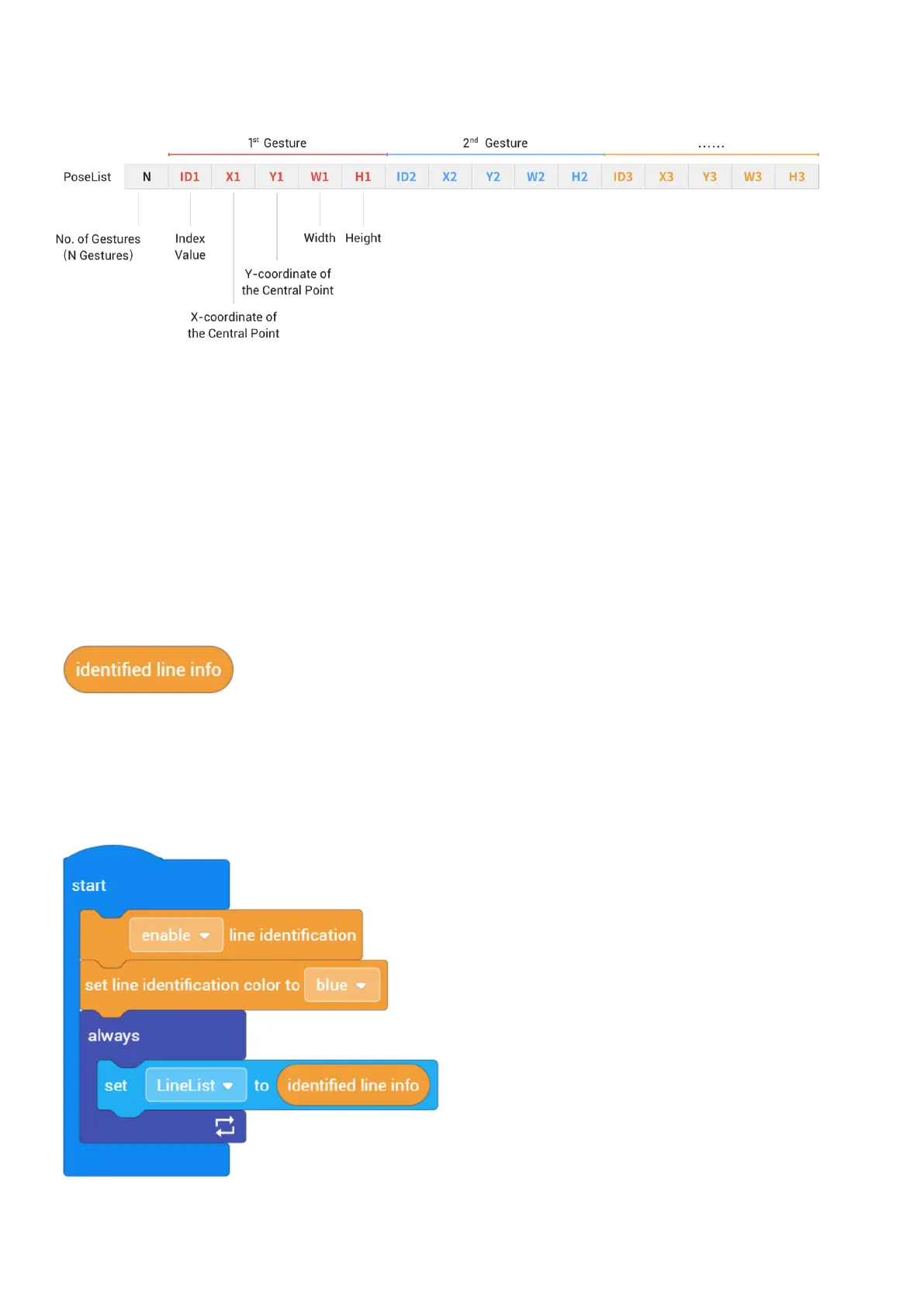
The first item is N, the number of gestures the robot has identified. The second item is a group of 5 numbers: gesture ID,
X-axis of the center point, Y-axis of the center point, W-width and H-height, followed by gesture ID, X-axis of the center
point, Y-axis of the center point, W-width and H-height of the second gesture, the third, ...
2) Descriptions for ID values:
ID=4: V
ID=5: inverted V
ID=6: take photo
Python API:
Function: vision_ctrl.get_pose_detection_info( )
Return value:
● detection_info(list)
18. Identified line info
(1) Description: Obtain identified line information. The parameters are N, Info, X, Y, θ, and C.
(2) Type: Information block (list-type data)
(3) Example: Single line information
Obtain the returned line information after a blue line appears in the robot’s FOV.
You can observe the real time line data changes through the FPV window.