72
Notes:
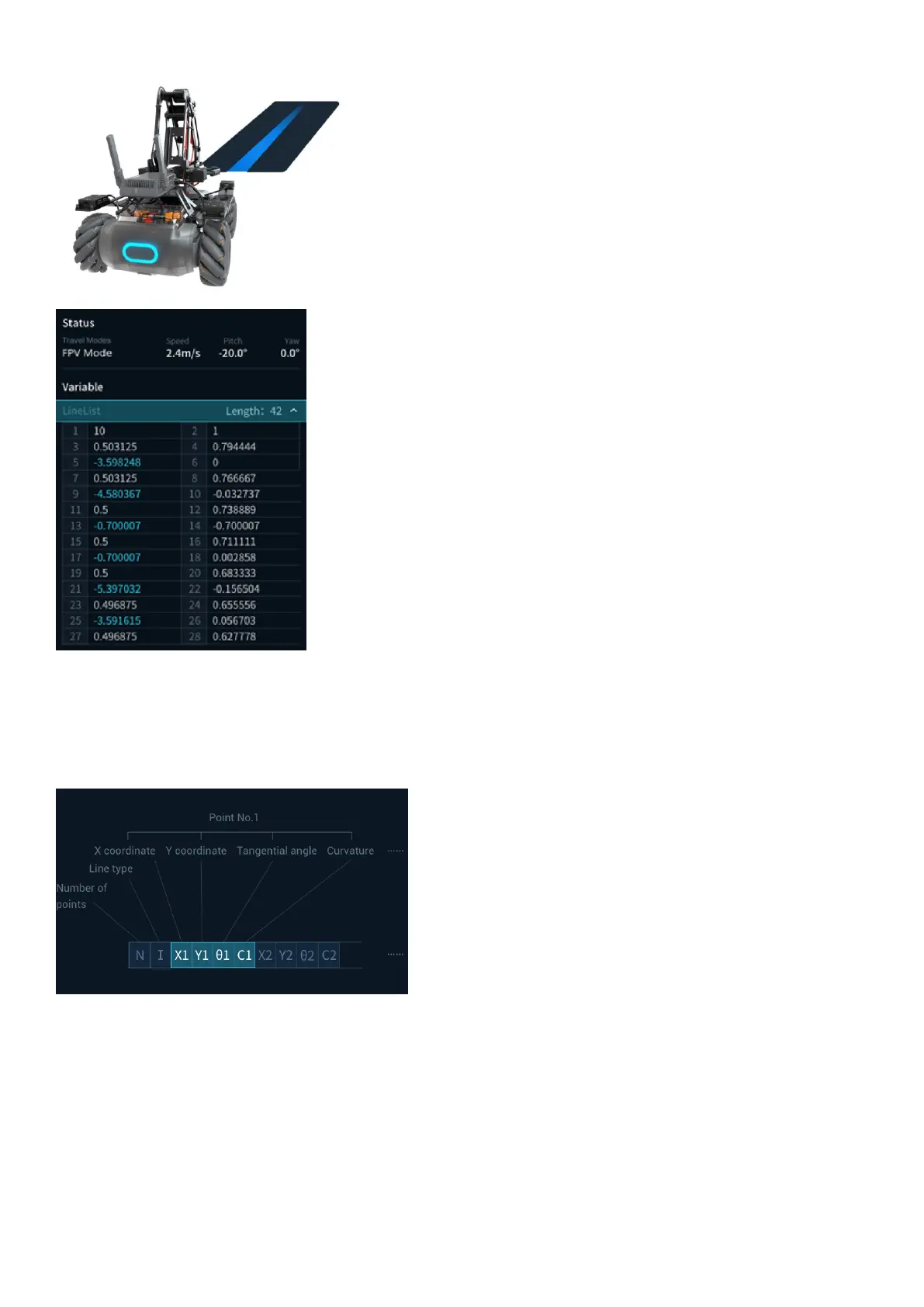
1) The single line information format that is identifiable by the robot is as follows:
The first item “N” is the number of points identified on the line, the second item ‘Info’ is the line type, and the subsequent items
are grouped into 4 data groups: they are the (Coordinate X, ordinate Y, actual tangent angle θ, curvature C) of ten points that are
equidistant from each other on the line (from the nearest to the farthest). There are altogether 42 sets of data.
The first data set, N: Number of points. The fixed value is 10 or 0 with “10” indicating line detection and “0” indicating the
opposite.
The second data set, I: line type 4 cases: “0”, indicates no line is identified; “1”, indicates one line within the FOV; “2”, indicates a
Y intersection; “3”, indicates a crossroad.