76
Python API:
Function: vision_ctrl.get_env_brightness( )
Return value:
● brightness_value(int)
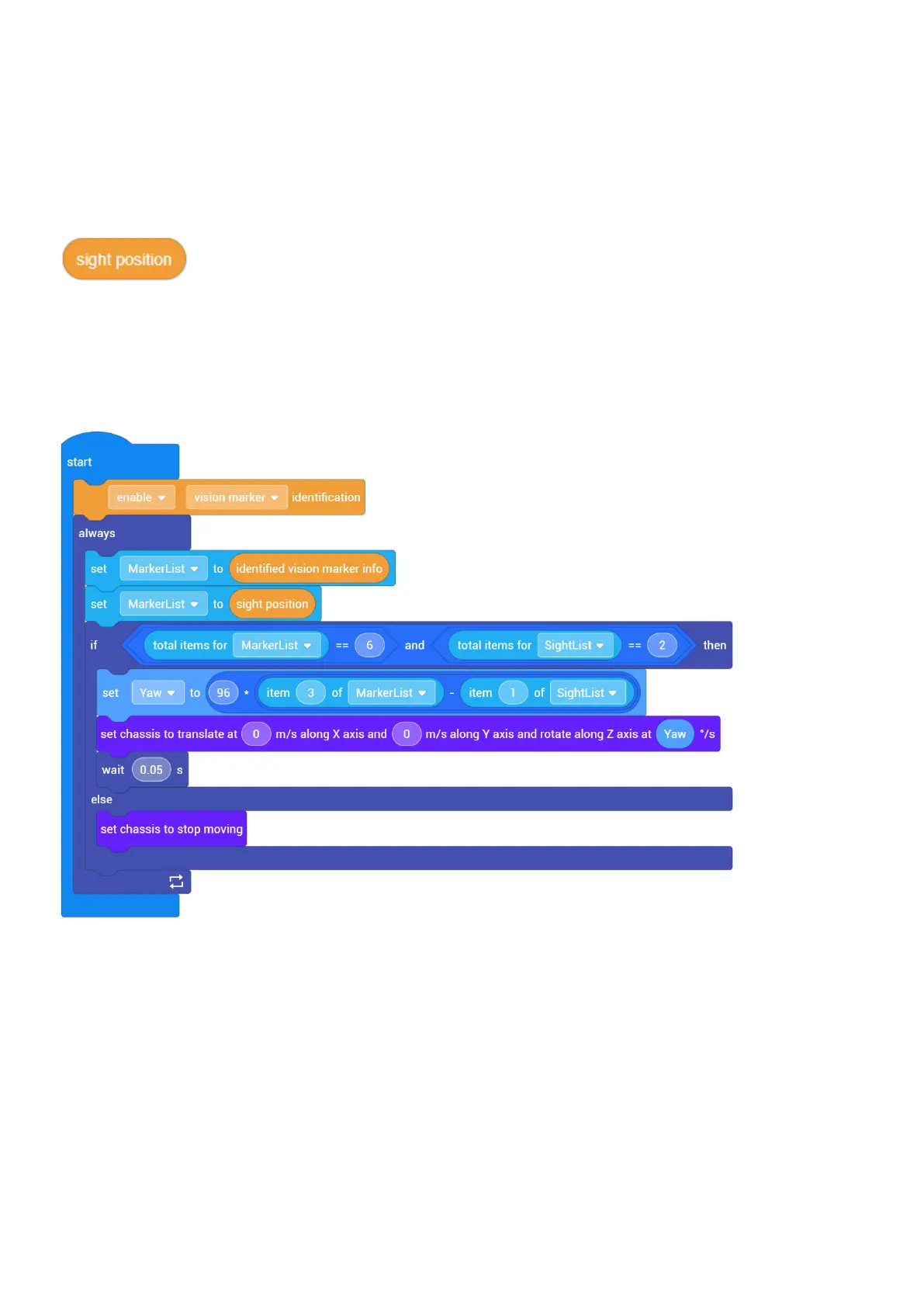
21. Sight position
(1) Description: Obtain information for sight position in terms of the parameters X and Y.
(2) Type: Information block (list-type data)
(3) Example: Follow vision markers
This will convert the difference between the sight position and a Vision Marker in the robot’s field of view into a chassis
rotation angle value in order to direct the chassis to move toward the Vision Marker.
Note:
Sign position format: X represents X-coordinate, and Y represents Y- coordinate.